- Providing perception and activity functions in response to assistance situations -
The National Institute of Advanced Industrial Science and Technology (AIST, President: Hiroyuki Yoshikawa) is working to assist people with daily living. As part of this work, AIST researchers have developed a humanoid robot platform that has expanded recognition and mobility functions.
Specifically, the humanoid robot HRP-2 Promet (hereafter called "HRP-2") is equipped with high-speed, high-precision cameras. These cameras can provide a new and improved vision system that senses target objects three-dimensionally as a human vision system. Furthermore, by walking around with its laser distance sensor, the robot can create a map of the room, use the map to recognize its position in the room, and find obstacles using the map and range data from the stereo camera system (Photo 1). In addition, the robot has been given an improved speech interface in which it can use the microphone array to distinguish between human voices and background noise (Photo 2).
What's more, a system has been developed in which the robot can be given remote control instructions interactively by a human operator for its own movement. Even if a recognition error occurs in the vision system, the robot can be easily stopped and given corrected information. It also has carrying functions which allow it to get a thing out of a refrigerator and take it to a designated location (Photos 3 and 4). Using this technology, expectations are rising that the robot will be able to assist people in daily living through verbal communication; even in constantly changing environments, the robot should be able to move when required and determine on its own what it is asked to retrieve and get it.
This research has been conducted as part of the AIST's "Development of a Humanoid Robot Platform for the Intelligence Booster for FY 2003-05". A part of this research has been done by AIST-CNRS JRL
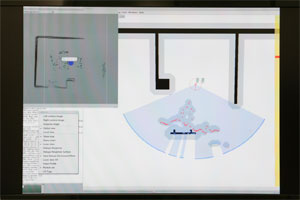
Photo 1: A map generated from the laser distance sensor information
|
|

Photo 2: Dialogue between a human and the HRP-2
|
|
|
|
|

Photo 3: HRP-2 is putting a chair in order
|
|

Photo 4: HRP-2 takes a 500ml can out of a fridge
|
In 1996, Honda Motor Co., Ltd. announced the development of its humanoid robot P2. Since that time, there has been a wealth of research on humanoid robots in Japan and around the world. By 2025, it is predicted that robots will be put to practical use helping with household chores, assisting senior citizens live independent lives, and providing people with other types of assistance in their daily lives.
Work is being done to develop a next-generation robot that can be a harmonious part of people's living environment as it communicates naturally with them and that assist with their daily lives. In order to achieve this goal, research is being conducted to develop technologies to give such a robot safety and consistency in its movements; a vision functionality that can sense 3-dimensional objects the same way a human vision system can; and a speech interface that can allow for natural dialogue between a human and the robot.
Utilizing its state-of–the-art facilities, the AIST is working to create a highly integrated, safe information and communications environment where anyone will be able to freely create, distribute and share the information and knowledge that they need. Against this backdrop, the development of human interface technology that will enable natural communication between humans and machines is one of the most important research themes. Humanoid robots that can safely and stably interact with humans in various types of environments can be called a type of human interface technology. Therefore, in FY2003 the AIST launched a project titled 'Development of a Humanoid Robot Platform for the Intelligence Booster' that was designed to develop humanoid robots that could be safely and stably manipulated under various environments and communicate naturally with people. The present research was undertaken as part of that project.
In the near future, it will be important for next-generation robots assisting people with daily living to be able to communicate verbally with people even in noisy environments, to accurately sense objects in their immediate surroundings, and to use this information to move when required. In the present research, these functions were incorporated into the HRP-2, which is a humanoid robot platform for assisting people with daily living. The HRP-2 has been given the following new and improved functions over the previous model:
-
The robot's vision system uses Versatile Volumetric Vision system(VVV). By replacing the head-mounted cameras with 4 high-precision color cameras, the ability of the robot to three-dimensionally sense its work environment, target objects, etc., like a human was enhanced. At the same time, its field of view was expanded to allow it to record a wider range of view.
-
A laser distance sensor was mounted on the head to create a system that would enable the robot to create two-dimensional maps and recognize its own position as it was moving. By juxtaposing its recognized position with the distance that it sensed to surrounding objects using the stereo camera, the robot was able to recognize and avoid obstacles (Photo 1).
-
The speech interface, which included a microphone array mounted on the head and specially developed a signal processing hardware, could distinguish between human voices and background noise, providing stable and consistent speech recognition (Photo 2).
-
An operating system that could respond to instruction of human operator was developed to give the robot various autonomous movements, such as touching objects in its environment and moving within the confines defined by the objects (for example, when opening a refrigerator door, the robot's "hand" touched the refrigerator in its environment, but could only open the door by moving its "hand" in a circular manner). Using this system, the robot could easily be given instructions for a series of movements consisting of opening the refrigerator door and removing objects inside (Photos 3 and 4).
By expanding and extending these functions, the robot could learn about its environment and "converse" with humans as it helped them in their daily lives. This led to the development of a humanoid robot that can move when required, can determine on its own what is told to get, and get it.