Kohtaro Ohba (Leader), the Ubiquitous Functions Research Group, Hiromu Onda (Senior Research Scientist), the Task Intelligence Research Group and Takeshi Sakaguchi (Senior Research Scientist), the Autonomous Behavior Control Research Group, the Intelligent Systems Research Institute (Director: Shigeoki Hirai) of the National Institute of Advanced Industrial Science and Technology (AIST) (President: Hiroyuki Yoshikawa) have developed several factors of the universal design for household robots in particular, with the cooperation of Takasuke Sonoyama of T-D-F/Robot & Interaction Design. This research was jointly conducted by the University of Tokyo, Toshiba Corp. and GNSS Technologies, Inc. in the project organized by the Next-generation Robots Coordination Program, Council for Science and Technology Policy - Coordination Program of Science and Technology Projects.
In conventional robotic development, a robot is built for a specialized purpose because its hardware is designed for a specific environment, and it is required to execute only a predetermined task in a specific environment. In practice, it is very difficult to develop a robot that can handle all the items found in a human living environment.
To overcome this difficulty, AIST devised some methods, as a part of environmental structuralization for the easy adaptation of robots to the human living environment, in which humans and robots can coexist. The methods include designing handles that are easily operable by robots, designing visual marks in order to provide the layouts and operating instructions of the handles, and building templates for the easy development of operation programs for robots. The introduction of a robot in households is expected to accelerate by the popularization of these methods.
The newly developed system will be presented in the third symposium of the Coordination Program of Science and Technology Projects, scheduled for October 23, 2007, and in the eighth symposium of the System Integration Division of the Society of Instrument and Control Engineers (SICE), scheduled for December 20–22, 2007.
 |
|
Demonstration
|
Traditionally, a robot was designed independently as a tool for achieving a specific objective. However, a common platform among different kinds of robot is desired in order to reduce the cost and time required for a development of a robot system. Because it is usually difficult for one type of hardware to handle different types of objects and environments, there is a great demand for hardware suitable for all types of objects and environments. However, building such hardware is difficult because of the limitations of the hardware and software (intelligence) of a robot.
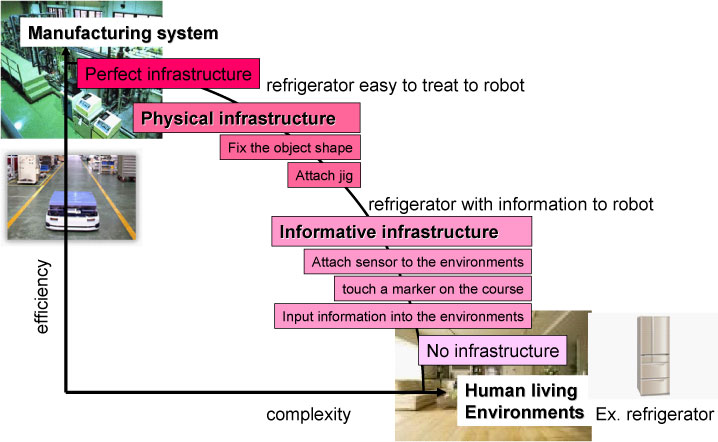
The robot industry has been developed considerably in the field of industrial robots. Now, it is possible for an industrial robot to execute a task accurately at high speed by limiting the target object and attaching markers that are easily recognizable in the environment. Structuralizing an environment as an infrastructure for the operation of robots is considered important in the technology strategy map outlined by the Ministry of Economy, Trade and Industry. However, it is still in the conceptual phase with very few proposals on a universal environmental structure in which humans and robots can coexist.
 |
|
Fig. 1: Infrastructure for Robots
|
AIST has been involved in the research and development of the structured environment for robots in order to realize universal robotics. AIST developed control techniques for knowledge distributed robots using IC tags in 2003 and an ultra-small network node for ubiquitous society in 2004. In 2005, AIST realized ubiquitous robotics in a household environment, and also developed the network technology of large number of distributed sensors in 2006.
We proposed the following, through discussions with other institutions in projects sponsored by the Japan Science and Technology Agency.
(1) a universal handle as an environmental structure that aids a robot in the easy execution of the tasks in households (2) the development of a visual marker (CLUE: coded landmark for ubiquitous environments) designed to ensure easy and accurate positioning necessary to execute a task (3) the development of templates for operation programs (UTD: universal template for doing), which is a task program template for ease of writing a program during the course of activities
(1) Universal handle
We expanded the concept of the universal design employed in today’s home electric appliances etc., which aims for a common design for easy handling by the elderly, the young, and the physically handicapped. And we aimed designs which are for many robots to execute tasks easily and for humans to operate it easily.
The design of a conventional handle is based on the human action of gripping, which is difficult for people with a weak grip such as the elderly and young. For the operation to open a door, people need not to grip a handle. When a handle is designed to hook and pull, even individuals with a weak grip can open a door by gently pulling the handle in the opening direction of door. Similarly, it is difficult for a robot to tightly grip the handle and open the door because of the stringent physical constraints. We evaluated the application of the human universal design aspects to robotics, and designed a handle such that a robot can open a door by gently pulling the handle.
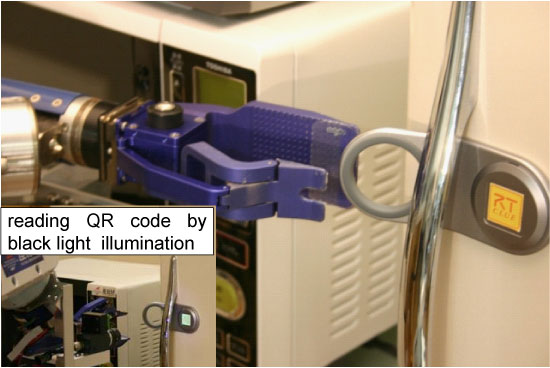
(2) Visual marker (CLUE)
CLUE is used to transmit information to robots. We prioritize that design which does not cause discomfort to humans or is invisible to humans, and that which transmit information only to robots.
When human observes a handle, he/she comprehends its location and decides how to open the door. A marker that designates the position of the handle and the information contained in the marker on how to open the door are very useful to a robot. We used the reading equipment of industrial QR codes for the robot’s eyes with the assistance of Denso Wave Inc. The robot determined the positions of the four corners of the QR codes from the reading equipment, and detected the relative positions.
(3) Templates for operation programs (UTD)
UTD provides templates for programming a robot’s standard tasks in the human living environment, for example, the opening and closing of doors. This is achieved by describing the robot’s tasks structurally and changing the physical constraints of the “pick and place” operation, namely picking, moving, and placing an object.
These templates are expected to simplify the structural programming in order to develop operation programs for robots and reduce development costs.
|
|
|
Fig. 2: Universal Hundle and CLUE.
|
 |
|
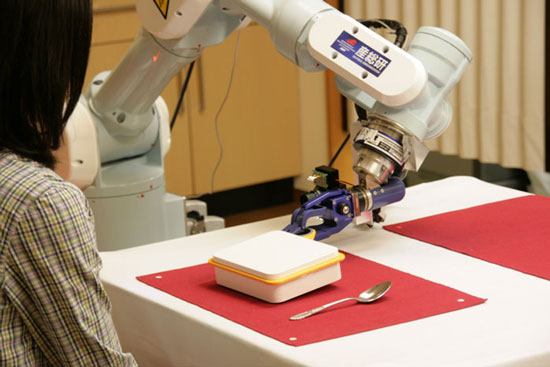
Fig. 3: Universal box.
|
 |
|
Fig. 4: Serving with Universal box.
|
Establishing a standard design for robot operation in human living environment is expected to accelerate robot utilization in all aspects close to human living environment, and create the robot system industry. We will expand our study to cover the environment design methods for newer robots. In 2008, demonstrative experiment of robots will be carried out at Kanagawa Robot Park which is aimed at practical use.