Update(MM/DD/YYYY):02/10/2010
RT-Middleware : OpenRTM-aist version 1.0 has been released
- An OMG-standard-compliant software platform for next generation robots -
Points
-
A software platform supporting the efficient development of flexible robot systems
-
Interoperability among operating systems, programming languages and vendors based on compliance with international standards
-
Distributed under dual licensing, with an open-source license and individual licenses
Summary
Noriaki Ando (Senior Research Scientist) of the Intelligent Systems Research Institute (Director: Hirohisa Hirukawa), the National Institute of Advanced Industrial Science and Technology (AIST) (President: Tamotsu Nomakuchi), has developed the newest version of the OpenRTM-aist (Open Robot Technology Middleware, implemented by AIST) version 1.0 for the C++ programming language. OpenRTM-aist is an RT (Robot Technology) Middleware software platform that supports flexible integration of various robotic functional elements across networks, distributed under an open-source license.
OpenRTM-aist is a software platform that allows the efficient development of robotic systems by modularizing the functional elements of robots, such as sensors, motors, robot arms and entire mobile robots, on a software level, and improving reliability and reusability. The interface specification of an RT Component, the modular atomic unit of software in the middleware, is based on the Robotic Technology Component (RTC) specification version 1.0. This specification has been adopted as an official standard specification by the OMG™ (Object Management Group™) international standardization organization. OpenRTM-aist is the world's first implementation based on the OMG RTC specification.
It is expected that OpenRTM-aist will serve as a common base technology to promote effective and efficient next-generation robot research and development. It is used for many robot systems, both within Japan and internationally. OpenRTM-aist is downloadable from "http://www.openrtm.org" as source code, as an installer for Windows, and as a package for Linux. The software uses a dual license system, under which users can freely select between either the open Eclipse Public License v1.0 (EPL) or an individual licensing agreement in consideration of both contribution to the open-source community and prospective industrialization by technology transfer.
 |
|
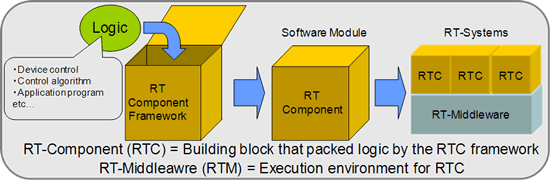
Figure 1: RT Middleware and RT Components |
|
Existing software resources are modularized using the RTC framework and executed in RTM. |
 |
|
Figure 2: Example RT Components |
|
Graphical User Interface (GUI) components, and RTSystemEditor, a tool that manages RTCs and RT systems |
Social Background for the Research
Previously, robot research and development has been highly inefficient. This is due to the isolated nature of development, where each organization has developed all its software from scratch. Moreover, since compatibility and standard interfaces between systems did not exist, preventing compatibility between developed resources without explicit design, a lot of work was necessary to reuse past software resources. This has increased the cost of robot system development. There are great hopes for robots that operate in our daily lives, such as in the fields of medical care, welfare, nursing and entertainment. It is expected that the improvement in development efficiency and the reduction of development cost afforded by modularization will realize a reduction in the cost of robots, increasing their commercial viability. In order to solve this problem, major research programs in many industrialized countries around the world are focusing on software platforms for robots.
History of the Research
The first version of this software, OpenRTM-aist version 0.2, was developed over three years beginning in 2002 as the "Underlying software infrastructure for the development of robots" (a New Energy and Industrial Technology Development Organization (NEDO)-sponsored project). In 2005, this version was released for evaluation. Following this, the interface specification of version 0.2 was used as the basis for a draft standard proposed to the OMG. The draft standard was developed in cooperation with middleware vendors from the United States of America, and proposed and adopted at OMG technical meetings. Based on the new RTC interface of the adopted specification, OpenRTM-aist version 0.4 was developed and released in May, 2006. The revised RTC standard was officially released by the OMG in April, 2008.
Based on its value as an international standard at the OMG and our standardization efforts, OpenRTM-aist-0.4 won the Robot Award 2007 (sponsored by the Ministry of Economy, Trade and Industry, Japan (METI)) in the Parts and Software category. RT Middleware is expected to spread rapidly as a software platform to accelerate the standardization of robot technology and to increase the efficiency of development, realizing practical service robots that can operate in the living spaces of our daily lives.
Because OpenRTM-aist is the basic technological infrastructure in the 5-year project for "Strategic development of advanced robotics elemental technologies" begun in 2007 by METI (from 2008, by NEDO), a wide range of RT Components and tools are being developed.
OpenRTM-aist is distributed openly over the Internet. Including all versions released so far, it has been downloaded over ten thousand times. OpenRTM-aist version 1.0 will be the first version in full compliance with the official OMG standard, and the world's first implementation of this specification. Aimed at practical applications, it features a high level of functionality and quality, including multifunctional data stream ports and a manager feature that allows management of RTCs on remote nodes.
Details of Research
The core of OpenRTM-aist and the OMG RTC standard is an RT Component architecture/software platform based on the concept of controlling and monitoring the state of software modules and the connections between those modules. By way of providing an RT Component framework with a unified method for managing and integrating RT Components, which provide a variety of functionality and are distributed across a network, robot system developers can easily modularize elemental robot functionalities and connect them to other modules. OpenRTM-aist provides not only a component framework but also a middleware library for managing the creation, execution, deletion, etc. of RT Components. Developers can, without regard for the details of the integration facilities, focus on the implementation of modularized functional software.
 |
|
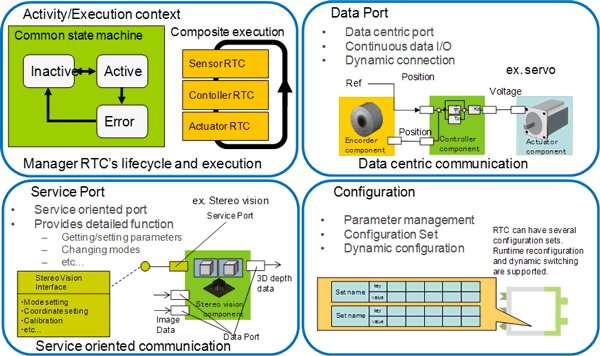
Figure 3: Main features of RT Components |
|
Modularize existing software assets using RT Components and execute on RT Middleware |
For system development when many people and vendors are involved, common interfaces can be specified for efficient development and easy reuse of modules. A major feature is the ability to easily use RT Components developed in different languages and running on different operating systems together. Using this feature, components can be implemented in the most appropriate language. For example, a highly-abstract component can be written in a high-level language while a component requiring speed above all else can be written in a faster, lower-level language. This makes the design and organization of robot systems, where a range of abstraction levels and granularities in design are necessary, more flexible.
 |
|
Figure 4: Examples of robots planned to be equipped with OpenRTM-aist |
|
(From left, Kawada Industries, Inc./AIST HRP-2, AIST HRP-4C, Kawada Industries, Inc. HIRO) |
Future Plans
METI and NEDO have started a 5-year project from 2007, the "Intelligent Robot Technology Software Project." As part of this, implementations of OpenRTM-aist-1.0 in the Java and Python programming languages, as well as robot system development tools compliant with OpenRTM-aist 1.0 that will make up the "Robot Software Platform," are under continuing development. In addition, as part of NEDO's 3-year project for the "Promotion of open innovation utilizing robot infrastructure," started in 2008, a version of OpenRTM-aist for the µITRON operating system is under development. Once complete, these will be publically released as open-source or free software.