独立行政法人 産業技術総合研究所【理事長 吉川 弘之】(以下「産総研」という)知能システム研究部門【研究部門長 平井 成興】空間機能研究グループ 大場 光太郎 研究グループ長、タスクインテリジェンス研究グループ 音田 弘 主任研究員、自律行動制御研究グループ 阪口 健 主任研究員らは、T-D-F/Robot & Interaction Designの園山隆輔氏の協力を得て、主に家庭を対象として、ロボットのためのユニバーサルデザインのいくつかの要素を開発した。本研究は、総合科学技術会議 科学技術連携施策群 次世代ロボット連携群(CPSTP)プロジェクトにおいて、東京大学、(株)東芝、測位衛星技術(株)とともに実施した。
従来のロボット開発では、ロボットは環境ごとに特化したハードウェアをデザインしているため、決まった環境において決まった作業しか出来ず、人間生活環境にある物全てを操作できるロボットを開発することは非常に困難であった。これに対し、産総研では人とロボットの共生のための環境構造化として、多くのロボットが扱いやすいハンドルのデザインや、ハンドルの位置決めや操作方法などを提供するマークのデザイン、さらに簡単に多くのロボット用の作業プログラムを作れるテンプレートの枠組みなど、ロボット導入を容易にする方法を開発した。
これらの方法が普及することにより、将来的に、ロボットの一般家庭への普及を加速するものと期待される。
なお、今回開発したシステムは、10月23日に開催される、次世代ロボット連携群 平成19年度第3回講演会、12月20-22日に開催される、第8回 計測自動制御学会 (SICE) システムインテグレーション部門講演会にて報告する予定である。
 |
「ロボットによるデモンストレーション」
ユニバーサルハンドルとビジュアルマーカーCLUEが装備された電子レンジと冷蔵庫を開け、冷蔵庫からCLUE付きのユニバーサル密閉容器を取り出す。
取り出したユニバーサル密閉容器を、電子レンジで加熱する。
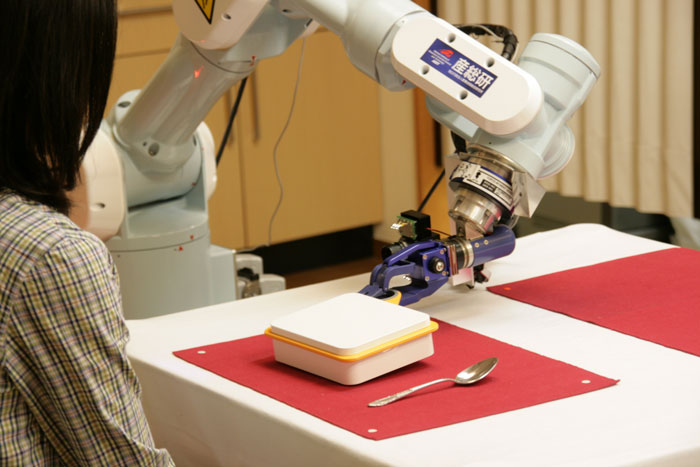
電子レンジから、ユニバーサル密閉容器を取り出し給仕を行う。
|
従来、ロボットは目的達成のツールとして、個々にデザインされてきた。しかしながら、ロボットシステムの開発コスト、開発期間などを短縮するためには、異なったロボット間での共通なプラットフォームが必要とされる。ロボット作業についてみてみると、作業環境、作業対象が異なると、同じハードウェアでは対応することが困難となることが多く、どのような環境のどのような対象物でも扱えるハードウェアを求める声が多いものの、ロボットのハードウェアとソフトウェア(知能)の限界から、困難とされてきた。
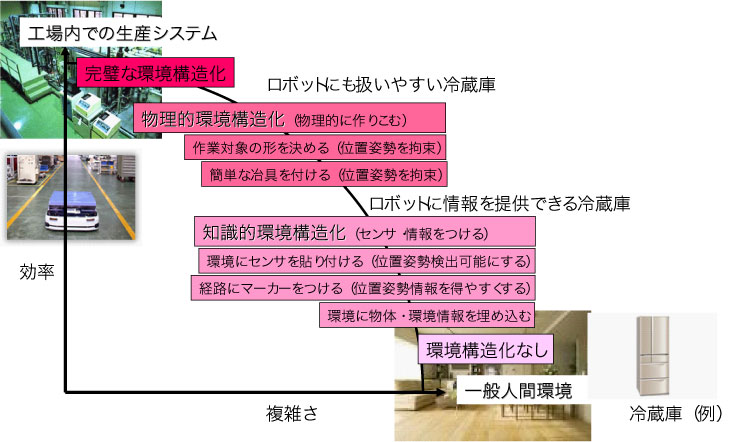
他方、ロボット産業として成熟している工場用のロボットでは、作業対象を限定し、環境に認識しやすいマーカーなどを添付することで、作業を高速かつ確実に行うことが可能となっている。このようにロボットを動かすためのインフラとして、環境を構造化する(環境構造化)ことは、経済産業省の技術戦略マップなどで重要とされているが、いまだ構想段階で、実際に人と共生できるユニバーサルな環境構造を提案している例は少ない。
 |
|
図1 ロボットのための環境構造化 |
産総研では、ユニバーサル・ロボティクス実現のため、平成15年にはICタグを用いた「知識分散型ロボット制御手法」の開発、平成16年にはユビキタス社会に向けた超小型ネットワーク・ノードを開発、平成17年には家庭生活環境にユビキタス・ロボティクスを実現、平成18年には大規模に分散したセンサのネットワーク技術の開発などを行い、ロボットのための環境構造化の研究開発を行っている。
産総研では、過去のロボット作業の研究開発や、独立行政法人 科学技術振興機構のプロジェクトでの他機関との議論により、(1)家庭内でのロボットの作業を容易とするための環境構造として、ユニバーサルハンドルなどの提案、(2)作業の際に必要となる位置決めを簡単・確実にするためのビジュアルマーカー(CLUE: Coded Landmark for Ubiquitous Environments)、(3)作業のプログラムを手間をかけずに書くための作業プログラムテンプレート(UTD: Universal Template for Doing)を開発した。
(1)ユニバーサルハンドルなど
ユニバーサルハンドルは、昨今の家電などにおけるユニバーサルデザイン(高齢者、若年者、障害者などでも容易に扱うための共通デザイン)を拡張し、人間でも作業が容易であることを考慮に入れつつ、複数のロボット間でも作業が容易であるデザインを重要視している。
通常のハンドルは、人間が掴む動作を基本としており、把持力の弱い高齢者や若年者にとっては難しい作業と言える。扉を開ける動作を考えた場合、ハンドルを掴む必要はなく、開く方向に手を引っ掛ける形でデザインすることで把持力が弱くても十分開けることが可能となる。同様にロボットについても、ハンドルをがっちりと把持して開ける動作は、物理的拘束条件が厳しいことなどから難しい作業と言えるが、ここでは前述の人間へのユニバーサルデザイン的な観点を尊重し、ロボットは引っ掛けることで開けられるようにハンドルをデザインしている。
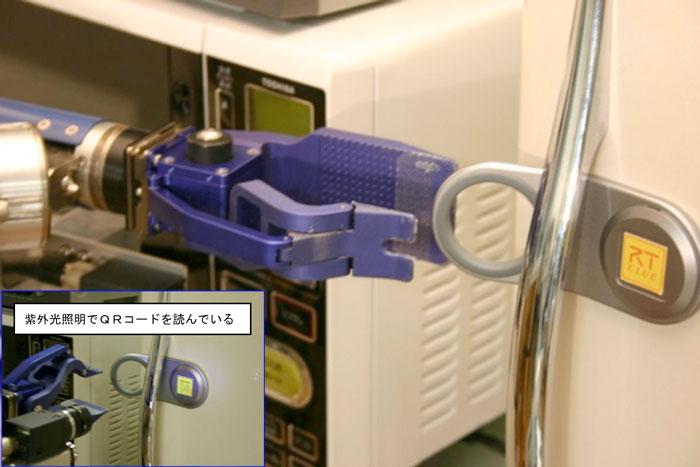
(2)ビジュアルマーカー:CLUE
ビジュアルマーカーCLUEについては、ロボットのための情報提供手法であることから、人間が見ても違和感のない、あるいは人間には不可視であってロボットに対してだけ情報を提供できる形態を重要視している。
人間はハンドルを見ることで、位置を認識し、どのように開けるかを判断しているが、ロボットの場合、ハンドルの位置を特定するマーカーがあると非常に有用であると同時に、そのハンドルをどのように開ければよいかの情報が得られると、非常に有用である。今回はロボットの目としては工業用QRコード読取装置を用い、(株)デンソーウェーブの協力を得て、読取装置からQRコードの4隅の位置を出し、その情報を用いることで相対位置検出を行った。
(3)作業プログラムテンプレート:UTD
作業プログラムテンプレートUTDは、物を掴み、移動し、離す(pick and place)操作を基準に、ロボットの作業を構造的に記述し、物理的な拘束条件を変えるだけで、人間作業に多い扉の開閉作業などに適応できる一般的なロボット作業プログラミングの記述を容易とするテンプレートを提供している。
このテンプレートにより、ロボットプログラムを作成する際には、容易にプログラムを構造的に書くことが可能となり、開発コストなどの軽減が期待できる。
 |
|
図2 ユニバーサルハンドルとCLUE |
 |
|
図3 ユニバーサル密閉容器 |
 |
|
図4 ユニバーサル密閉容器を使った給仕 |
人間環境におけるロボット操作対象などの標準的なデザインが決まることにより、人間の身近な空間でのロボットの利用が大きく広がることが期待できる。更にロボットシステム産業の創出も視野に入ってくる。新しいロボットのための環境デザイン手法の考えを広げながら、平成20年度には、神奈川県ロボットパークにおいて、さらにロボット実証を通じ、実用化を目指す。