独立行政法人 産業技術総合研究所【理事長 吉川 弘之】(以下「産総研」という)知能システム研究部門【部門長 平井 成興】、社団法人 日本ロボット工業会【会長 田_ 雅元】、松下電工株式会社【社長経営執行役 畑中 浩一】は、経済産業省の21世紀ロボットチャレンジプログラムの施策のもと、独立行政法人 新エネルギー・産業技術総合開発機構【理事長 牧野 力】の委託事業として、2002年度から3年計画で「ロボットの開発基盤となるソフトウエア上の基盤整備」※1【プロジェクトリーダー 谷江 和雄 産総研 評価部 首席評価役】の研究開発を推進している。
本プロジェクトでは、ユーザの多様なニーズに応えられるロボットシステム※2の実現を目指して、ロボットそのものや機能部品をソフトウエアレベルでモジュール化し、システム設計者となるインテグレータがユーザの要求に応えるロボットやシステムを、それらモジュール化された機能部品を活用することによって、比較的容易に構築することを可能にする技術を研究開発している。今回、こうしたロボットシステム構築法を提案し、その一例として生活空間でサービスを提供する実証システムとして生活支援ロボットシステム(RTスペース)を開発した。
※1 RTプロジェクトHP 【http://www.is.aist.go.jp/rt/】
※2 本発表資料中で用いるロボットとは、これまでのロボット概念から脱却し、「ロボット技術を活用した、実世界に働きかける機能を持つ知能化システム」の広い意味でロボットと表現している。
 |
|
ロボット機能を内蔵した生活支援ロボットシステムとしてのリビング・キッチン(RTスペース)
|
今回開発した生活支援ロボットシステムは、ロボット機能を内蔵した、いわゆる典型的な家庭のリビング・キッチンである。このリビング・キッチンには、音声出力機能付き移動ロボット、電動ドア、制御スイッチ付き照明器具などの「機能部品」が組み込まれている。これらの機能部品は、ネットワークに接続され、家庭内に設置されたサーバのプログラムによってそれぞれの機能部品を協調動作させることで居住者が希望するサービスを提供する。どのように機能部品を協調させるかは、居住者がどのようなサービスを求めるかに依存する。開発した生活支援ロボットシステムでは、居住者の希望に応じてリビング・キッチンの設計者が、サーバに適切なアプリケーションプログラムを作成することによって実現される。
一方、設計者が居住者の要望に応じて機能部品を協調させるアプリケーションプログラムを自由に開発できるようにするには、ネットワークに接続されている機能部品に内蔵されたソフトウエアを、機能部品を協調させるアプリケーションプログラムを作成する設計者が自由に活用できるように、機能部品とネットワーク間のインタフェースが公開(オープン化)されていることが必要である。開発した生活支援ロボットシステムでは、分散オブジェクトプログラミングで使われるミドルウエア技術を使い、機能部品を分散オブジェクトとして記述することで、オープン化されたインタフェースを有するモジュールとしてネットワーク上でそれを扱えるようにした。
類似のシステムとしては、情報家電の世界でも研究開発が行われているが、今回開発した生活支援ロボットシステムが情報家電と異なる点は、情報家電は、各機器が単機能なので個々の機器をネットワークに接続することによりユーザの要求を満たす(個々の機器でサービスが完結)ように作られているのに対し、今回開発した生活支援ロボットシステムは、サーバに構築される設計者が作成するアプリケーションプログラムにより全体の機器を協調させることで様々な機能が発揮できるように、機能部品が提供されていることである。こうした機能の「作り込み」が可能なシステムは、ユーザ要求が多様な生活支援システムの市場で、ユーザ要求に合うシステムをユーザに提供する上で、極めて重要である。
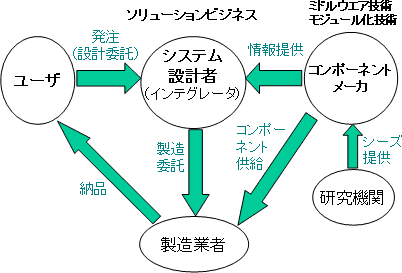
各社が共通のミドルウエアを使って機能部品をモジュール化して市場に提供すれば、異なるメーカが提供する機能部品を組み合わせたシステムの構築も可能になる。こうした環境が整備されると、生活支援ロボット産業は、機能部品を市場に提供するビジネスと、機能部品の組み合わせ設計とアプリケーションプログラムの開発を通してユーザの要求に合ったシステムを提供するシステムインテグレーションビジネスとで構成され、多様なニーズに応じられるロボットが開発されることになると予測される。
産業用ロボットの基本的機能は、教示再生機能である。教示した動作を再生することによって、さまざまな単純繰り返し作業を自動化することができる。こうしたロボットが、一定の市場規模をもつビジネスとして成立するにいたった背景には、ユーザ(すなわち自動車や電子機器の製造メーカ等)全体に工場内の「単純繰り返し作業」の自動化、省人化という均質な要求が存在し、それに教示再生技術が応えることができたからであった。
日常生活を支援するロボットに目を転じると、言葉の上では、例えば高齢者の介護、介助、あるいは生活支援のためのロボットが求められていると単純に言われているが、実はその要求内容は複雑で、各個人の要求を確認してみるとそこには個人ごとに微妙に異なった要求がある。
生活の場でさまざまなサービスを人に提供するロボットの市場は、高齢化社会の人口構造から想定されるそのユーザ規模を考えると、きわめて巨大で、未来のロボット産業にとって魅力的なことは疑う余地はないが、反面、均質ユーザニーズを背景に成立した産業用ロボットのビジネスとは異なり、極めて多様な要求を満たすロボット、機械、あるいはシステムが求められている。
最近、介護、介助、コミュニケーションなどの生活支援ロボットの開発は各方面で進められているが、多くの努力にもかかわらず、今ひとつ大規模な市場展開をする商品が生まれるには至っていない。いずれの技術開発成果も、技術そのもののレベルは高く、一部ユーザの要求は満たすとしても、多様なユーザの要求、好みを満たすに至らないのが大規模市場に展開しない原因と考えられる。
このような多様なユーザニーズを満たす日常生活分野のロボットにおいて大規模市場に展開する産業を立ち上げていくには、従来の産業用ロボットとは異なるビジネス展開の戦略をとる必要がある。そこで必要なことは、次の3点である。
-
各ユーザの好みに合うロボットを迅速かつ安価に開発できる基盤を整備すること。
-
ユーザの要求をオン・デマンドで吸収してシステムを設計し、ユーザの好みに合うロボット商品を提供できる基盤を整備すること。
-
ユーザの要求の追加や変更に対応し、システムの機能を速やかに追加・改変できること。
こうした背景に鑑み、今回開発した生活支援ロボットシステムは、マンションの居住スペースの典型的な家庭のリビング・キッチンを想定して開発を行った。このリビング・キッチンに、通常の建築資材のほかに、音声出力機能付き移動ロボット、電動ドア、制御スイッチ付き照明器具、カメラ付きインターホンなどの「機能部品」を組み込むことでロボット機能を内蔵した生活支援ロボットシステム(RTスペース)を構成している。これらの機能部品は、ネットワークに接続され、家庭内に設置されたサーバのアプリケーションプログラムによって制御される。
ユーザの要求に応えるサービスを提供するシステムを容易に設計できる技術としてロボットシステムを効率良く開発するためのソフトウエア技術を結集したミドルウエアを本プロジェクトではRTミドルウエアと呼び、技術開発を進めている。
開発のポイントは、いかに居住者の要望に合わせて、これらの機能部品を組み合わせて求める機能を実現するかである。居住者の好みのライフスタイルを実現するカスタマイズされたロボットシステムとしての商品を提供するために、RTミドルウエアの機能として、機能部品の制御プログラムをモジュール化する共通の入れ物であるフレームワークと、モジュール化された機能部品間の通信やデータ管理および状態監視などをサポートする管理機能を作成した。これにより、住居内の機能部品を連係動作させるアプリケーションプログラムを容易に作成できるようになった。
最初のステップとして、モジュール化した共通のインタフェースを持つソフトウエア部品としてRTコンポーネントと呼ぶ機能部品を開発した。具体的にはRTミドルウエアのモジュール化機能を利用して以下のような機能部品(RTコンポーネント)を用意した。
・音声出力機能付き移動ロボット(音声および映像)
・コミュニケーション用携帯情報端末PDA(音声認識、ディスプレイ上のメニュー選択)
・開閉機能付き冷蔵庫
・電動ドア
・制御スイッチ付き照明器具
・電気錠
・カメラ付きインターホン(親機・子器)
・ディスプレイ用モニタテレビ
 |
|
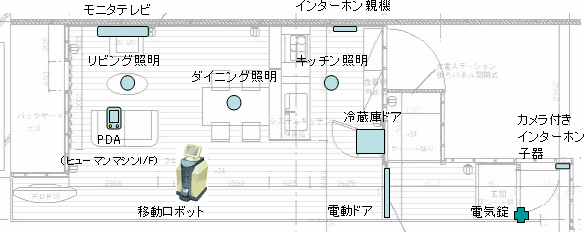
RTコンポーネントの配置図
|
次のステップとして、これらの機能部品(RTコンポーネント)を連携させて居住者のライフスタイルに合わせたサービスを提供するアプリケーションプログラムを作成した。具体的には、RTスペースの設計者となるインテグレータがRTミドルウエアを利用して機能部品(RTコンポーネント)を連携させ、居住者の希望するサービスを提供するためのスクリプトとしてのアプリケーションプログラムを作成してサーバに格納する。
開発した生活支援ロボットシステムでは、RTミドルウエアの管理機能により居住者の指示やセンサ信号に応じて、対応するスクリプトが実行されて一連のサービスを提供する。例えば、次のようなサービスが可能である。
-
玄関ドアの外にカメラ付きインターホン子器が設置されており、訪問者が呼び鈴を押すと、それをサーバが認識し、玄関のインターホン子器のカメラ映像を室内のモニタテレビに映す。また、移動ロボットに情報を送り、訪問者が来たことを居住者に告げさせる。
-
居住者は、モニタテレビで来訪者を確認し、家の中に入れるべき人であると判断すると、移動ロボットに訪問者を玄関で迎えるように手元のPDAを使って指令する。
-
移動ロボットは、玄関に向かい、電動ドアに信号を送り、玄関の電動錠を開錠する。
-
移動ロボットは、訪問者に挨拶のメッセ-ジを送り、訪問者をリビングに案内する。
また、上記のほかにも居住者の指令に応じて、照明の点灯/消灯、移動ロボットを使って冷蔵庫を開けて中に入っているものを確認するなどの仕事をサービスとして組み込むことができる。
どのように機能部品(RTコンポーネント)を協調させるかは、居住者がどのようなサービスを求めるかに依存する。開発した生活支援ロボットシステムでは、居住者の希望に応じてリビングルームの設計者がサーバに適切な、アプリケーションプログラムを作成することによって実現される。
従来のロボットシステムではシステム変更に際して大幅なソフトウエアの変更を強いられていた。今回開発したRTミドルウエアの機能を使うことで、ユーザが望むサービスを実現するのに既存の機能部品(RTコンポーネント)では対応出来ない場合においても、必要となる機能を提供する機器をモジュール化して新たな機能部品(RTコンポーネント)を作製し、それをネットワークに接続して追加することで、それを組み込んだ新しいサービスを容易に提供することが可能になる。
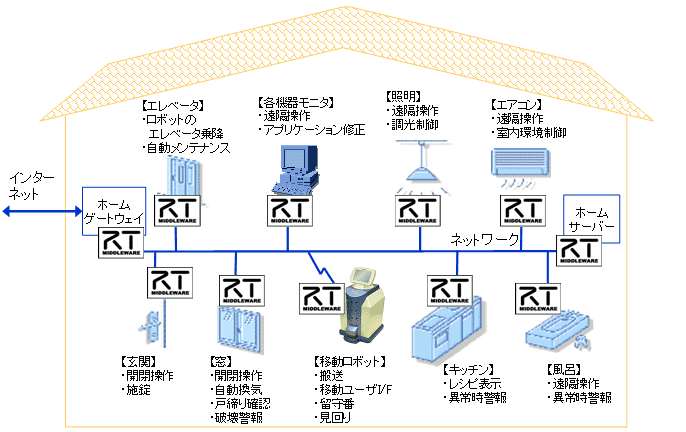 |
|
機能部品が組み込まれた住宅イメージ
|
今回開発した機能部品のモジュール化技術は、素早い応答が求められるいわゆる実時間での機能部品間の協調動作には十分な性能を備えていない。ロボットシステムの構築には、機能部品同士を実時間で協調動作させることが不可欠な場合も多く、ロボットシステムの特性に配慮した機能部品の統合化が求められる。そのため、こうした実時間システムの設計・開発を支援するためのミドルウエア技術が必要であり、別途開発を進めている。また、市場化を念頭に置き、各企業が提供する機能部品、ロボットを使ったロボットシステムの構築をも可能とするためのロボット機能部品のオープン化、RTミドルウエアの標準化を推進する予定である。
また、今回開発した生活支援ロボットシステムでは、使われた各機能部品はプロジェクト内の企業(すなわち1社)で作製されたが、各企業が共通のミドルウエアを使用し、機能部品をモジュール化して市場に提供すれば、異なるメーカが提供する機能部品を組み合わせたシステムの構築も可能になる。こうした環境が整備されると、生活支援ロボット産業は分業体制が進み、多数のベンチャー企業や中小企業がそれぞれの得意とする分野で技術を商品として提供するような新たな市場が創出され、価格競争体質から付加価値競争体質への産業構造の変革が期待される。
今回開発した方法で設計された多様なニーズに応じられるロボットシステムが実際に商品として提供されるためには、安全性と信頼性を高める技術開発が課題となるとともに、個々の機能要素の信頼性を保証する認証組織や万が一の事故に対する責任などの問題解決に取り組まなければならない。こうした課題については別途検討を進める予定である。
 |
|
提案するロボット産業のビジネスモデル
|