ドローンで災害現場に埋まった車両を探査する
ドローンで災害現場に埋まった車両を探査する
2017/11/30
ドローンで災害現場に埋まった車両を探査する地下探査技術とフィールドロボティクスの融合で、迅速な救出活動に貢献
 異分野技術のかけ算で、世の中の役に立つ新たな用途が花開く。
異分野技術のかけ算で、世の中の役に立つ新たな用途が花開く。
土砂災害などの現場では、人命救助のためにも埋もれてしまった車両を一刻も早く探し出したい。しかし、災害現場には人が立ち入るのが難しい場合も多い。産総研は、長年培ってきた地下探査技術と、近年注目されているフィールドロボティクスの技術を融合させ、ドローンを用いた埋没車両の探査技術を開発。災害時の迅速な救出活動を支援する、新たな手段の実現に向けて歩みを進めている。
地下物理探査の技術を災害対応に応用したい
近年、ゲリラ豪雨や地震などにより、土砂災害が頻発している。通行中の車両が土砂崩れに巻き込まれた事故も、多くの人の記憶に残っているだろう。人命救助のためには一刻も早く埋没車両を探す必要があるが、土砂崩れの範囲が広いときは、探査地点を特定することすら困難を極める。しかも土砂災害の現場は足場が悪いことも多く、いつ次の土砂崩れが起きるかもわからない。
また、大規模な土砂災害地では、土砂が河川をせき止めて天然ダムを形成することもあり、その後のダムの決壊が二次災害として懸念される場合がある。救助隊員がまきこまれて被害が拡大する危険もあるため、迅速な探査活動が難しいのが実情だ。
そのような現場で埋没車両を探査するにはどうしたらよいだろうか。土砂災害に限らず、人が近づくのが難しい災害現場で埋没しているモノの位置を特定できる技術があれば、救助活動や天然ダムの決壊予測に大きく貢献できるはずだ。
こんな発想のもと、産総研は2014年にドローンによる埋没車両の探査および地質調査技術の開発に着手した。ドローンによって土砂に埋もれた人を捜索することは困難でも、人が閉じ込められている自動車を探索することは可能かもしれないと考えたからである。
この技術を発想したのは、知能システム研究部門フィールドロボティクス研究グループの加藤晋だ。加藤らは、災害対応や社会インフラの維持・整備、資源開発に役立つロボティクス技術の研究・開発に取り組んでおり、特に野外のさまざまな環境における移動や作業のためのアクセス技術や制御技術の開発に注力していた。
「私たちは、小型のロボットによる探査や、ホイールローダーや自動車の自律化の技術開発を進めていて、その中で、アクセス性の高いドローンの研究開発もすでに行っていました。そこで、土砂崩落や火山災害現場にアクセスすることを可能とする、地上走行型や空中飛行型のロボットシステムの開発を進めようとしていました。災害状況調査に対する課題の1つに、土砂崩落及び火山災害現場における含水比や透水性などの計測がありました。このような探査センサーがあれば、さまざまなロボットによるアクセス技術と組み合わせて、簡単に解決できると思ったのです」
ただ、加藤は地下の様子を地表から探査する技術に関しては素人であり、どの程度の大きさの探査センサーが必要なのかも、それが本当にドローンに搭載可能かどうかもわからなかった。そんな時、同じ産総研の中に物理現象を利用した地下探査の専門家がいることがわかった。地圏資源環境研究部門で地下環境や地下資源の調査・評価を専門とする、光畑裕司である。
「最初は、専門分野がまったく異なるため、それほど簡単に共同でできそうな雰囲気ではありませんでした。でも、空中からでも探査できるセンサー技術が、埋没車両も探査できると知り、これは災害現場での迅速な状況調査には絶対に必要な技術だからと、初対面にも関わらず光畑さんを説得して一緒にやってもらうことにしました」加藤はそう笑う。
光畑は、物理現象の中でも電磁気を利用した電磁探査の専門家であり、小型の電磁探査センサーを土壌汚染調査などに適用した実績をもっていた。当時、ヘリコプターから大型の電磁探査のセンサーを吊り下げて、飛行しながら地下を探査する技術はすでに実用化されており、鉱物資源探査や地下水調査に適用されていた。加藤から話を聞いた光畑は、この連携を進めた方が良いと直感したという。もしドローンを使って小型の電磁探査センサーを吊り下げて調査することが可能となれば、もっと狭いところに入ることができ、土木調査や農業分野へも展開できるのではないかと考えたからだ。「とにかくやってみようと思いました」と光畑は言う。こうして分野の異なる2つのチームは共同で研究開発をスタートさせた。
地下の様子を可視化する
加藤は当初、センサーをドローンに吊り下げればよいだけだと考えていた。ところが、対象が浅層とはいえ、地下探査に用いる地下電磁探査センサーは長さが1.6 mもある。そこに位置情報収集用のGPS信号受信機、センサーの制御と計測データのモニタリングのための無線通信装置、対地高度を測定する超音波距離センサーなど、さまざまなセンサーや送受信器を組み合わせると、それだけで4~5 kgにもなるのだ。
 テーブルの上に置かれているのが長さ1.6 m重さ約5 kgの電磁探査センサーの実物。
テーブルの上に置かれているのが長さ1.6 m重さ約5 kgの電磁探査センサーの実物。
光畑は「ドローンにこれだけの重さのものが吊れるのか。吊れたとしても揺れが激しく、正確な計測ができないのではないか」と懸念していた。
ここで地下探査の技術について少し触れておくと、地下資源や地下構造を調べるための物理学的な手法には、重力、磁力、地震波、放射線、それに電気や電磁気を用いる探査法があり、今回は電磁気で探査する方法を使っている。これは電磁誘導現象を利用して、地盤の中の比抵抗(電気の通しにくさ)や金属物質の分布を非接触で検知し、可視化する技術だ。地下水や地下の粘土層の分布も、この方法を用いて三次元的に把握することができる。
実は、この方法で埋没車両を探査する技術の有効性は、すでに10年ほど前に野外実験で検証されていた。
「そのやり方は、人がセンサーを持ち、歩いて調査することが基本でした。しかし、災害現場には人が立ち入れないことが多く、実際には使えない。そのため、技術開発はそこまででストップしていたのです」光畑はそう語る。ドローンとのコラボレーションで、ようやく実用化につなげられる可能性が出てきたというわけだ。
最初の難関 ドローンを安定して飛行させるには?
センサーを吊り下げたドローンが災害現場の上を飛び、地下の様子を可視化する。一見するとシンプルだが、いざ共同開発が始まると課題は山積みだった。
まずはドローンのモーターが電磁波を発するため、電磁探査センサーがその影響を受け、正確な計測ができなくなることがわかった。
「これはドローンとセンサーをつなぐロープを長くし、両者の距離を離せばよいのですが、距離を長くするほどドローンの飛行が不安定になります。一回揺れ始めると、センサー部が振り子のように揺れて、制御できなくなってしまいます。ロープの長さを少しずつ変え、電磁波のノイズの影響が少なく、かつ安定飛行ができる長さを探っていきました」
そう説明する加藤のチームは実験を重ね、結果としてロープの長さは4 mに決定した。これは積載重量6 kgのドローンを用いていた2016年度の数字だが、現在は、もっと大型のドローンを使い5 mの距離を取れるようになった。
とはいえ、単にセンサーを吊り下げただけでは飛行は不安定になる。風を受けると吊り下げたセンサーが水平に回転してしまうのだ。地下の計測を正確に行うにはセンサーが一定の対地高度を保つ必要があり、そのためには安定飛行を是が非でも実現しなければならなかった。チームは1.6 mものセンサーの実物大模型を作成し、飛行に伴うセンサーの揺れや回転が安定化するよう、吊り下げ方法を試行錯誤した。その結果、揺れを安定化させるには複雑な吊り下げ機構よりもシンプルな2点吊りが有効で、回転を抑えるにはセンサーの片端に垂直尾翼を装着し、センサーが常にドローンの進む方向に向くような設計を採用することで解決方法を見出した。
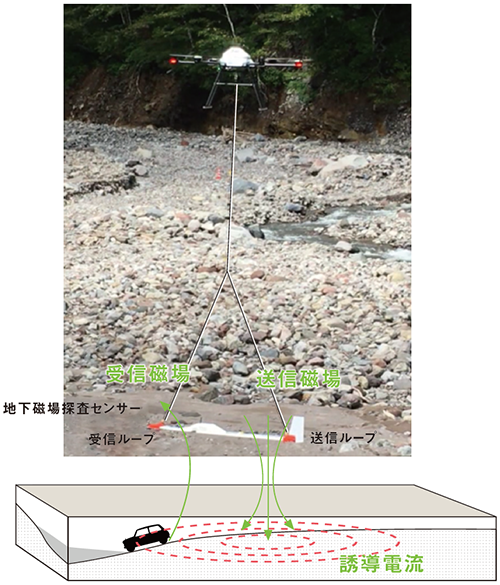 送信ループに交流電流を流すと、磁場が発生(送信磁場)し、その磁場の変動に対応して地盤や埋没車両に誘導電流が生じる。その誘導電流から新たに生じた磁場を受信ループでキャッチ(受信磁場)することで、地下の金属製の異常物体の存在を探知できる。
送信ループに交流電流を流すと、磁場が発生(送信磁場)し、その磁場の変動に対応して地盤や埋没車両に誘導電流が生じる。その誘導電流から新たに生じた磁場を受信ループでキャッチ(受信磁場)することで、地下の金属製の異常物体の存在を探知できる。
しかし、実際に屋外で実物を飛ばしてみると思わぬ結果になることが多かった。そのたびに吊り下げ方法や取り付け治具を改良し飛行実験を行ったのだが、垂直尾翼についても、その回転を抑える効果は、ドローンの飛行速度に左右されることがわかったのである。
「尾翼の効果は飛行速度が速いほど上がるのですが、精度が高く分解能が細かいデータを取得するためには、ゆっくりと飛行させる必要があります。秒速1 mから5 mまで飛行速度を変えながら、飛行の安定性や取得できるデータの精度をみて、これらを両立するには、少なくとも秒速2 m以上の速度が必要だと結論づけました」と光畑は説明する。
災害現場でのオンサイト可視化を実現
加藤がセンサーの吊り下げや冶具の開発、ドローンの安定飛行の課題解決に取り組んでいる間、光畑はデータ計測状況をリアルタイムでモニタリングし、データ取得後に調査現場でデータを処理・可視化する技術の開発を進めていた。土壌汚染や地下水調査などの地質調査の場合、取得データは研究室に持ち帰って処理や詳細な解析を行うが、今回は災害現場で用いる前提であるため、データをその場で可視化できないと役に立たないからだ。
「センサーからはさまざまな周波数の電磁場を出して、地下の多様な深度の情報を取得しています。車両埋没部についてはパルス状に異常な信号が出るので、地下水探査などの信号に比べて特殊な解析は必要ありません。そこでその情報をGPSの情報と組み合わせて、Google Earthに重ねて表示できるようにしました」
 測定データを航空写真に重ねて表示ができる。ドローンの航行奇跡の青いラインのうち、浅い埋没車両のある部分は赤くはっきりと検出できていることがわかる。
測定データを航空写真に重ねて表示ができる。ドローンの航行奇跡の青いラインのうち、浅い埋没車両のある部分は赤くはっきりと検出できていることがわかる。
一方、地質調査のためのデータは、緊急に解析する必要性は低いため、通常通り持ち帰って慎重に処理を行う二段構えで進めることにした。リアルタイムでモニタリングし、オンサイトでデータ処理や可視化をする技術は、地下環境や土木・地盤調査の探査にも迅速性をもたらし、良いフィードバックができる可能性があると、光畑は期待している。
そして2017年2月、ドローンにセンサーを吊り下げたこのシステムを用いて、自動車2台をそれぞれ1.5 mと3 mの深さに埋めた実験場で実証実験をすることとなった。飛行速度は毎秒約2 m、センサー部の対地高度は約1 mだ。調査対象エリア(70 m×35 m)を粗めの飛行間隔で網羅的に探査する広域探査と、それにより抽出された特定エリアをより細かな飛行間隔で詳細に探査する精密探査の2つの実験を行った。
その結果、広域探査では、より深い位置にあった今回の対象ではない残留構造物は検知したが、埋没車両はわずかに把握できる程度だった。しかし精密探査では、浅い方の車両を明確に検知できたほか、深い方の車両も弱い信号ながら検知することに成功した。
「今後はドローンとセンサーの距離をさらに離すことで、より精度を向上させるとともに、現場での実験を重ねて実績を積んでいきたいと考えています。急な斜面でも飛行やデータ取得が可能なのかなど、実験しなくてはわからないケースがまだたくさん残っています」(光畑)
「災害現場の救出活動に使う技術というのは、本当は出番がない方がよいものです。しかし、あることでいざという時の救出活動に役立てられるのです。災害現場は一様ではありません。どのような状況に使えて、どのような場所はまだ難しいといった情報をユーザーと共有し、実用化に向けて進めていきます」(加藤)
災害現場などに効率的にアクセスし、迅速な人命救助に結び付ける技術は、日本のみならず世界中で求められている。今後、この技術が精度を高め、応用範囲を拡げ、ドローンの航行技術がより向上していけば、探査対象も埋没車両だけでなく、多様な対象物を探索する手段として、現場での活用機会が広がっていくだろう。
知能システム研究部門
フィールドロボティクス研究
グループ
研究グループ長
加藤 晋
Kato Shin
地圏資源環境研究部門
研究部門長
光畑 裕司
Mitsuhata Yuji
産総研
情報・人間工学領域
知能システム研究部門
産総研
地質調査総合センター
地圏資源環境研究部門