三菱重工業株式会社【取締役社長 西岡 喬】(以下「三菱重工」という)は、人間型ロボットをプラントの保守点検に応用することを目指し、本田技研工業株式会社で開発された人間型ロボットHRP-1に、ICタグ誘導システムや画像処理を組み合わせた自律遠隔融合制御を搭載し、運転中プラントを想定した模擬環境下で計器確認やバルブ開閉などの代表的な保守・点検動作を実現した。
運転中プラントでは、高温などの各種の特殊環境下での運転中点検が望まれているが、点検員の安全確保が重要な課題であるため、ロボット化のニーズがある。ロボットによるプラントの巡回点検を行うには、階段、配管、狭隘部がある複雑な点検ルートの連続自律移動、想定外の異常への対応(点検ルートにない場所までの移動、バルブ開閉などの機器保守)が確実に、迅速に行えることが必要である。
三菱重工では、人が立ち入ることを前提につくられたプラント内移動には人間型ロボットが適していると考え、これを用いたプラント保守・点検システムを開発してきた。
本研究では、人に代わって運転中プラント点検を迅速に行える保守点検システムの開発を目標にかかげ、平成12年度に人間型ロボットHRP-1の運動性能評価、平成13年度はICタグ誘導によるプラント模擬環境内の連続移動と計器確認動作(日常点検機能)を検証した。今年度は、想定外の事象に対して簡易にロボットを遠隔操作するためのインターフェイスと画像フィードバックによるバルブ開閉動作を開発し、全遠隔操作される従来のプラント点検ロボットに比べて迅速な保守点検動作を実現した。
○ICタグ誘導による複雑な点検ルートの自律ナビゲーション
-
移動マップを必要とせず、現場合わせで点検コースを容易設定できるICタグ誘導システム
(ICタグには、約20個のコマンドを組み合わせて、各場所での移動や点検動作を記載)
-
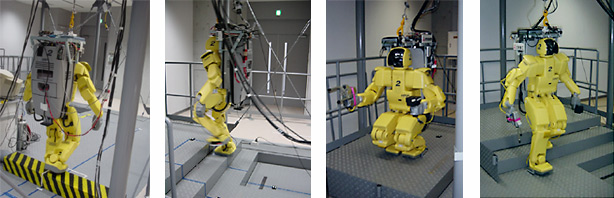
磁気センサによる正確な位置姿勢決め(±10mm、±2deg)により、パイプ乗り越え、階段(連続4段)、幅800mm狭隘部からなる複雑な点検ルートを自律移動
 |
|
図1 自律による巡回ルートの移動と点検 |
○ロボットの画像情報を利用した簡易遠隔教示インターフェイス
-
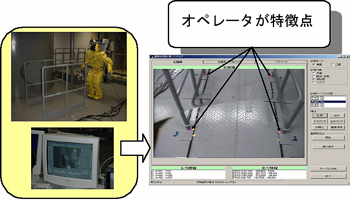
移動対象物の特徴点4点を画像上でマウス入力するだけで、対象物の位置を画像計測(±10~±50mm:測定距離500~3000mm)し移動経路を自動生成。当社比50%教示時間を短縮
-
上記遠隔教示で165mm階段、800mm手摺狭隘部の移動を例証
 |
|
図2 手摺通路手前での操作状況 |
○画像フィードバックによる手先位置決めによるバルブ開閉作業の高速化
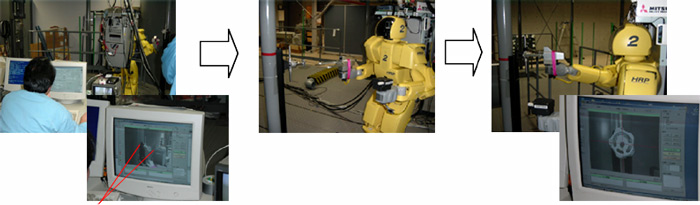
バルブの特徴点2点を画像上でマウス入力するだけで、バルブの3次元位置姿勢を画像計測(±50mm、±5deg)し、アームの作業範囲を考慮して立ち位置姿勢を自動調整。
その後、バルブ開閉工具に取り付けた手先カメラにより、画像フィードバックで手先位置(バルブ開閉工具)を自動調節することにより、当社比50%教示時間を短縮
 |
|
(1)バルブ特徴点をマウスで入力
|
(2)バルブ位置計測結果に基づき立ち位置姿勢を自動修正
|
(3)手先カメラでバルブ中心位置を計測して手先位置を修正しながらバルブに回転工具を挿入し、バルブを開閉
|