 現在のロボット産業では、工業用途のロボットに加え、人間生活環境で活躍するロボットが期待されているが、現状の人工知能技術や画像処理技術などによるロボット制御では、人間生活環境に存在する全ての物体の認識が困難であることから、人間生活環境で活躍するまでには至っていない。
現在のロボット産業では、工業用途のロボットに加え、人間生活環境で活躍するロボットが期待されているが、現状の人工知能技術や画像処理技術などによるロボット制御では、人間生活環境に存在する全ての物体の認識が困難であることから、人間生活環境で活躍するまでには至っていない。
独立行政法人 産業技術総合研究所【理事長 吉川 弘之】(以下「産総研」という)知能システム研究部門【部門長 谷江 和雄】は、将来、全ての物体にICタグがつくことを想定し、ICタグの中に製造者のネットワークアドレスと、ロボットがその物体を操作するために必要な知識情報を入れておくことで、物体認識を容易にすると同時に、ロボットプログラムにかかる負荷を軽減することを可能とする「知識分散型ロボット制御手法」を提案(特許申請中)し、既存のICタグ技術、画像処理技術、ロボット制御技術を用いて、その実証プラントを開発した。
今回開発したプラントは、机の上に任意に置かれた食器等の片付け作業に応用するものである。ICタグリーダーを仕込んだ机の上に、無造作に置かれた食器を自動で片付けるとともに、食器の種類などを認識しながらロボット動作計画を作るシステムを構築し、提案手法の有効性を実証した。
本開発システムは、ロボットシステム製造者がプログラムにかける負荷を大きく軽減し、人間生活環境下で活躍するロボットの開発スピードを大幅に速めることができると期待される。
今後、この制御手法を、より一般的な仕事に適用し、有効性を実証していく予定である。
なお、本システムは2003.11.13(木)09:30-16:00に産総研つくばセンターにおいて開催される「 産業技術総合研究所知能システム研究部門研究成果展示会-オープンハウス2003- 」にて当該研究部門との連携に興味をもつ企業・大学関係者向けに公開する予定である。
|
|
|
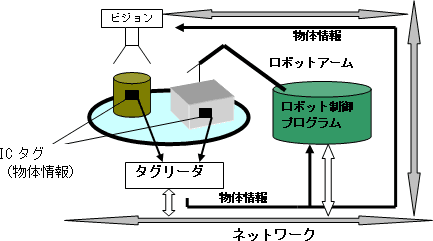
「知識分散型ロボット制御」概念図
|
|
《 特許 》
1.特願2003-325768、「ロボット及び物体処理手法」
2.特願2003-326171、「物体処理システム、物体処理手法及びロボット」
3.特願2003-326470、「物体処理システム、物体処理手法及びロボット」
4.特願2003-326715、「物体処理システム、物体処理手法及びロボット」
|
ロボットに作業をさせる方法としては、作業空間の知識を幾何モデルで記述し、モデルの世界で作業プランを自律生成する「モデルベースト手法」がよく知られている。この方法の問題点は、作業空間が複雑になると知識の記述が困難になることである。本研究開発では、この点を克服すべくユビキタスコンピューティング技術を導入し、作業空間の構造を、作業空間に存在する物体の提供者が記述できるようする知識分散化空間の枠組みを検討した。
本研究では、ICタグ技術とネットワーク技術を利用することで、知識分散化空間実験システムを構築した。知識分散化空間においては、環境中の全ての物体を情報化する。その手段として近年普及しつつあるICタグは、非常に小型軽量であり、知識分散化空間を実現する目的に適した情報化機器である。また、情報のやり取りが頻繁に行なわれるため、常時双方向通信が可能であることが望ましい。近年普及の著しい広帯域通信網のようなネットワーク技術を利用することで、比較的容易に常時双方向通信を実現した。
- 知識生成の分散化 -
知識分散型ロボット制御システムでは、物体を取り扱うための知識は、ロボットを含め物体を提供する側が生成し、それを物体自体に貼り付ける事を提案する。これにより、初めて環境に追加された物体であってもロボットは特別な教示をすることなく新たな物体を操作する事ができる。
- 分散知識の認識への利用 -
従来、ロボットが画像処理技術などを用いて環境情報を取得する場合、物体認識が困難とされてきた。知識分散型ロボット制御システムでは、物体自身が認識情報を発信するから、従来と比べて、はるかに物体認識が容易である。
今回構築したプラットホームをベースに、より一般的な環境で動くロボットシステムの構築を試み、「知識分散型ロボット制御手法」の実証を行う。この研究は、人間生活環境内を自由に活躍するロボットを実現するための大きな障害を取り除き、近い将来、多くのロボットが人間生活環境で自由自在に活躍することを促進するものと思われる。
例えばロボットがある物体を操作するには、その物体のどこをどのようにつかむかなどの「操作知識」を必要とする。人はこの操作知識をすでにもっているので、いともたやすく物体を操作することができる。一般に、ロボットに作業をさせる場合に必要な操作知識は、これまでは、ロボットを設計する人が作業内容をみて作成し、ロボットの行動プログラムの中に埋め込んでいた。したがって、工場の中などのように、人が設計したライン上で決まった手順に従って、供給される物体を操作するような場合は、実用的な作業ロボットを構築できたが、われわれが生活する環境の中で、煩雑に存在する物体を相手に作業するロボットを構築することは、埋め込む操作知識が複雑になり非常に困難であった。
そこで、今回、各物体にICタグを貼り付け、そのICタグの中に例えばその物体の形の情報や、物体のどこをつかむことができるかといった、その物体の操作に必要な情報を記述しておき、ロボットは、タグリーダによってロボット内のコントローラにそれを読み込むことで、その物体を操作するために必要な知識を得て、物体を操作する方法を提案し、その有効性を実験プラントで実証した。このシステムの特徴は、従来、物体を操作する知識をその物体を操作するロボットを提供する人が作成していたのに対し、ICタグの技術を利用することで、物体を作製する人が物体操作知識を記述し、こうした操作知識を内蔵した物体を市場に提供し、それを有効活用できる枠組みを示したところである。この開発モデルに従えば、ロボットの提供者は、必要な物体操作データをICタグを介して読み出すソフトを作成しそれを制御プログラムに取り込むだけで、目的とする物体操作が行える。今回開発した「分散的に知識を記述する」システムは、ロボットが行動する環境が工場のようにロボット向きに整えられていないわれわれの生活空間のような場において自律的に行動するロボットを実現する上で、今後のICタグ技術の進展にも支援されて、強力な手段を提供すると考えられる。
開発したシステムでは、ICタグ、タグリーダ、ロボットはすべてネットワークで結合されており、操作知識情報のやり取りはネットワーク通信環境の中で行われる。ロボット技術にネットワークを活用し、応用範囲を広げることは、ロボット技術分野では1990年代の前半からネットワークロボティクスとして活発に研究されてきたが、今回の提案はロボットとネットワーク技術の新たな可能性を示すものでもある。

ICタグを添付した皿 |
|
|
実験例題としては、テーブルの上の食器を片付ける作業をとりあげている。すなわち煩雑にテーブルの上におかれた複数のコップや皿などをあと片付け用ワゴンプレートに搬送する作業である。コップや皿にはICタグが貼り付けられその物体の操作知識が埋め込まれている。テーブルに設置されたタグリーダがその情報を読み取り、ネットワークを介してロボットに転送する。ロボットは、その情報をもとにビジョンを介して物体の位置を認識するとともに、ICタグから得た知識に基づき物体を把持し、ワゴンのプレート上にコップや皿を搬送する。コップや皿はテーブル上に置かれていれば、いつどのようにおかれてもロボットは適切に後片付け作業を実行できる。 |

開発実験システム
|

天井カメラからの図
|