独立行政法人 産業技術総合研究所【理事長 吉川 弘之】(以下「産総研」という)電力エネルギー研究部門【部門長 大和田野 芳郎】は、東京大学【総長 佐々木 毅】、NEC東芝スペースシステム株式会社【代表取締役社長 林 宏美】、株式会社東芝【(代)取締役社長 岡村 正】と共同で、宇宙ロボットを利用し、衛星と軌道を保全する仕組みを持たせた「宇宙環境保全システム」の基本的な技術を開発しました。
これは、ロボット化した宇宙機(宇宙メンテナンスロボ)により、軌道上で多数の小型衛星を組立てたり、軌道上の衛星を捕獲して診断・保守・補給をしたり、かつ、ミッション末期には、衛星を回収して投棄することにより、宇宙環境の保護、小型衛星群による宇宙インフラの信頼性向上、長寿命化に役立てようとするものです。多才な宇宙ロボットにより、衛星群の「ゆりかごから墓場まで」の一生をケアする技術と喩えることができます。
現在、地球周回軌道には直径10cm以上の大型のデブリ(宇宙のゴミ)でも約9000個あり、年間300個の割合で増加しています。その相対速度はおよそ10km/sで、小さな破片でも宇宙船に大きな損傷を与えます。デブリ同士の衝突連鎖により破片が急増し、将来の宇宙活動を脅かすことが懸念されており、宇宙環境は保護すべき段階に来ています。
一方、情報化社会の進展によるグローバル・パーソナル・モバイルの高品質情報通信や、高分解能で絶え間ない地球観測などのため、多数の小型衛星をネットワーク利用するシステムが期待されます。これらの要請に応えるためには、デブリを増やすことなく、かつ、保守できる頑健な情報インフラとすることが望まれます。その解決策の一つとして、宇宙ロボットにより衛星群を保守したり、不要となった衛星を回収・分解・投棄して衛星と軌道を保全する仕組みを持たせた「宇宙環境保全システム」を提案し、研究を進めてきました
このようなシステムを実現するためには、ロボットで簡単に組立、保守ができる新しいタイプの小型衛星と、軌道上で衛星を組立て、捕獲し、異常箇所を診断し、保守・交換を行い、寿命末期に衛星を回収して軌道外に投棄するためのロボットの技術が必要となります。産総研では世界に先駆け、これらの技術の研究・開発に取り組み、このたび、その主要な技術である小型衛星の「組立」「捕獲」「ミッションモジュール交換」「分解・収納」の地上実証実験に成功しました。
これらの技術は、将来的には衛星のみならず、宇宙システム全体を使い捨て型から保守・再生型へ構造転換する基盤技術に発展するものと期待されます。
情報化社会の進展により多数の衛星を群にしてネットワーク利用するシステムが期待される。低・中高度軌道の通信衛星は、通信遅れが少ないこと、通信パワーの減衰が少ないため違和感のない音声通信、グローバル性、移動性、携帯性に優れた通信を提供するものとして注目されている。Iridiumは商用化に到らなかったが、IT革命が進むと、地上と宇宙に相補的な高品質の情報通信ネットワークが不可欠になるものと予測される。また、リモートセンシング分野においても、低高度からのネットワーク型地球観測は高分解能と高頻度観測をもたらすため、資源探査から環境モニタリングへと利用範囲を広げ、将来は生活情報などのパーソナルな利用まで進むことが予測される。これらは低・中高度軌道上に分散させた多数の小型衛星群で構成する必要があるが、安定したサービスを低コストで提供するインフラとして発展させるには、これらに対する保守システムが望まれる。
一方、宇宙軌道では不要となったデブリが急増しており、衝突頻度の増大や相互衝突によるデブリの急速な再生産が懸念され、宇宙環境は保全を必要とする段階に来つつある。前述の小型衛星群はこのような宇宙環境保護と両立させ構築、運用されなければならない。その解決策の一つとして、ロボットにより、衛星群を保守、延命したり、不要となった衛星を回収・投棄して、貴重な衛星と軌道の資源を保全する仕組みを持たせた「宇宙環境保全システム」が考えられる。
当研究グループでは、これまで宇宙で精密作業を行うロボティクスの研究を行ってきており、技術試験衛星VII型での世界初の精密テレロボティクスの宇宙実験などに参画してきた。これらの成果を踏まえ、平成9年度より、宇宙のゴミを抑制する「宇宙環境保全システム」を実現する技術、衛星の軌道上メンテナンスにより使い捨て型宇宙システムから再生型の宇宙システムへ転換するための基礎技術の研究を行っており、今回、その主要な技術である小型衛星の「組立」「捕獲」「ミッションモジュール交換」「分解・収納」の地上実証実験に成功した。
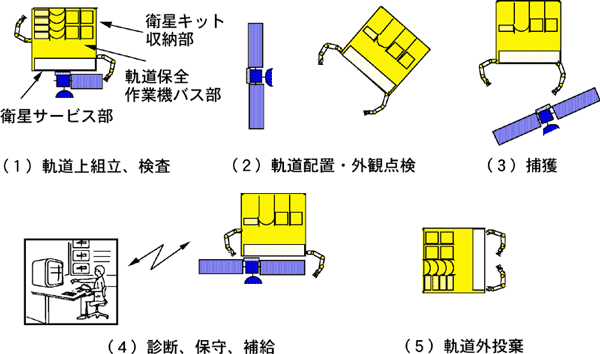
本研究を実施するためのレファレンス(雛型)として設定した「宇宙環境保全システム」の概念を、図1に示した。小型衛星は軌道上で保守しやすいように、かつ、輸送単価を下げるため収納量が最大になるようモジュール化し、分解した状態で補給品とともに軌道保全作業機(宇宙メンテナンスロボ)の積み荷として打ち上げる。これらを軌道上でロボットにより組立てる。組立検査を行った後、所要軌道に分散配置する。軌道保全作業機は、同一軌道面に配置された多数の衛星を定期点検する。必要に応じ捕獲して診断し、故障したモジュールや消耗モジュール(バッテリー、推進剤など)を交換する。寿命末期には、衛星を回収し分解・収納して軌道外に輸送し投棄する。このように軌道保全作業機は、小型衛星群の「ゆりかごから墓場まで」をケアする。
【 デブリとなった衛星をロボットにより除去しようとする研究は他機関でも試みられているが、デブリを出さないことおよび宇宙インフラの頑健性を与えることを目的とし、ロボットにより衛星と軌道を保全する仕組みを持たせる技術の研究を行っているのは世界的にも当グループが初めてである。 】
このシステムを実現するには、従来の衛星やロボットとは異なるアプローチが必要である。ロボットで組立・保守しやすい衛星、および衛星の組立・保守はもとより、捕獲・分解することができるロボット化した軌道保全作業機の技術がキーとなる。以下に、これらの研究成果の要点を述べる。
 |
|
図1 宇宙環境保全型システムのレファレンスミッション
|
[ 軌道上組立・保守対応小型衛星 ]
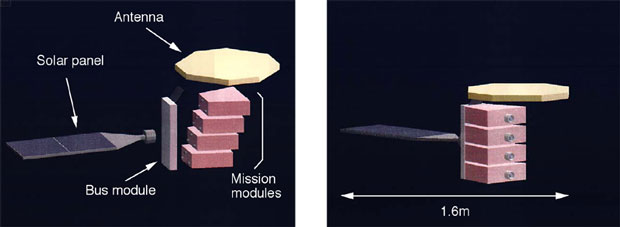
従来の衛星は複雑で、ロボットで組立てたり、保守・分解することはできない。そのため、衛星のサブシステムをいくつかのシンプルなモジュールに分割し、ロボットにより軌道上での組立・保守等が可能な構造を研究した。ここでは、多数の衛星を積載するための収納性と、軌道上での組立性、点検性、保守性、分解性を考慮し、図2に示すように「バス部」「ミッション部(複数)」「アンテナ」「太陽電池パネル」にモジュール化した衛星の構造モデルを開発した。バス部を基礎構体とし、他のモジュールはこれに枝状に取り付ける構造としている。ミッションモジュールはバスにモジュールを多段に挿入可能な設計とし、通信や観測など多様なミッションに対する拡張性を与えている。ロボットによる組立・分解・交換を容易にするため、各モジュールの結合方式は2種類に共通化している。このようなモジュール構造の衛星とすることにより、技術試験衛星VII型などでフライト実績のあるロボットを多少高度化するだけで軌道上組立・保守が可能となる見通しが得られている。
 |
|
図2 軌道上組立・保守対応小型衛星の構造
|
[ 軌道保全作業機 ]
本研究での軌道保全作業機の特徴は、以下のとおりである。
(1)運用を含めたトータルシステムの低コスト化に重点を置き、シンプルかつ自律性の高いシステムとする。
(2)衛星の組立・保守プラットフォームとしての機能を持たせる。( 工場的機能 )
(3)衛星の点検・診断プラットフォームとしての機能を持たせる。( 病院的機能 )
(4)衛星を追跡し、捕獲する機能を持たせる。
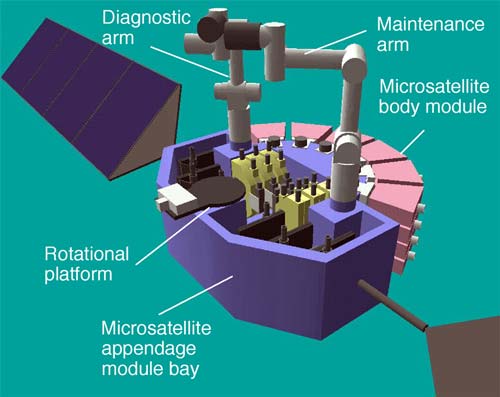
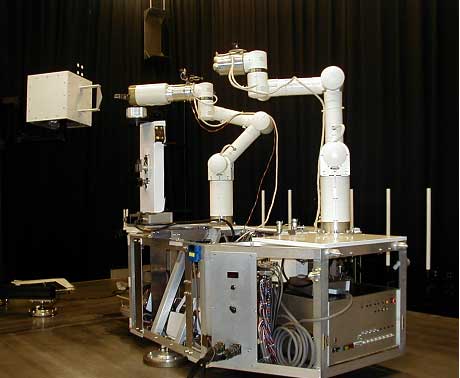
図3に研究モデルの概念図を示す。軌道保全作業機に2基のロボットシステムを搭載し、周囲に積荷である小型衛星のバス構体を配置し、内部に柔軟物であるアンテナや太陽電池パネルを収納する。ロボットは、アーム・エンドエフェクタ・ステレオカメラ・回転ステージ・各種の診断用センサおよび制御器を主な構成要素とする。ロボットは、衛星を回転ステージに設置し、組立や保守・診断のテーブルとして使用する。作業の監視や点検は、一方のロボットアームにより行う。今回開発した研究モデルは、直径約2.2mの機体で数十kg級の小型衛星を6機搭載することを想定したものであるが、大型化によりさらに多くの衛星の搭載・保全が可能である。
 |
|
図3 軌道保全作業機の構成
|
[ ロボットによる衛星の組立・保守・分解 ]
上記軌道保全作業機の研究モデルにより、自律的に衛星の組立・保守・分解を行う技術を開発した。これらのタスクの実行には主として4つの技術課題があり、それぞれ次のように解決した。
(1)作業の自動化・シンプル化・高信頼化
→ロボットフレンドリーな衛星モジュール構造とサブタスクの共通化
(2)長く柔軟な衛星部材(アンテナ、ソーラーパネルなど)の端面の精密勘合・挿入
→グローピングおよびウォブリングなどのヒューリスティックなスキルの導入
(3)組立・分解プロセスでの折り畳み構造物(アンテナ、ソーラーパネルなど)の位置不確定性
→マーカーの形状・色相情報を用い、複雑な背景でも認識可能なロバストな画像計測
(4)宇宙空間へのモジュールの放出防止
→エンドエフェクタにより把持したままでのモジュール結合方式、および力・変位の合理性判断による締結確認
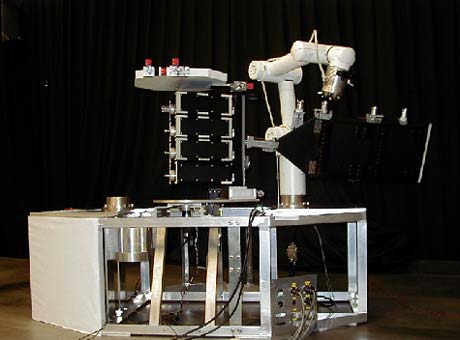
ロボットは、衛星モジュールのマークを探して掴む動作( Look & Move )と、人間のように手探りと微少揺らし( Groping & Wobbling )による精密組立の動作を基本戦術として組み合わせることにより、自律的に作業を行う。組立時間は約45分であり、低地球軌道では1周回したときに衛星が組み上がっていることに相当する。図4に衛星組立の様子を示す。
 |
|
図4 ロボットによる衛星組立(太陽電池パネル取付け・展開の様子)
|
[ ロボットによる衛星の捕獲 ]
ロボットにより衛星を捕獲するには、軌道保全作業機を、対象とする衛星に飛行・接近させ、その相対位置・姿勢を検出し、動きに追従しながらタイミングを合わせて、衛星に取付けたハンドルを掴む技術が必要となる。姿勢安定した衛星の捕獲は、宇宙飛行士がスペースシャトルのマニピュレータを操縦して行っているが、故障し不安定な運動をしている衛星の捕獲は行われていない。運動している衛星を捕獲する場合、不用意に接触すると衛星を弾き飛ばすことになる。そこで、軌道保全作業機の飛行とアーム動作の協調、マーク(目印)の画像処理によるターゲット位置・姿勢の推定、アームのターゲットへの臨機応変な追従制御、位置誤差が多少あってもロバストにハンドルを巻き込むハンド機構等の技術を開発した。ここでは、ハンドに馴染み機構を有した捕獲グリッパを開発し、捕獲の確実性を向上させた。図5に無重力を模擬したエアフロア上の軌道保全作業機が、空間で回転運動している衛星を捕獲する様子を示す。実験では毎分1回転する衛星を自律的に捕獲できることを確認している。このような捕獲技術は宇宙デブリ除去などにも応用できる。
なお、捕獲グリッパは東北大学、三菱重工業株式会社と共同で開発したものである。
 |
|
図5 軌道保全作業機による模擬衛星捕獲
|
本研究は小型衛星群を直接のターゲットとしたが、宇宙インフラストラクチャの構築技術、宇宙システム全体を使い捨て型から保守・再生型へ構造転換する基盤技術、宇宙システムの低コスト化に役立つ技術を含んでおり、利用分野の開拓および研究成果の移転に努める予定である。