国立研究開発法人 産業技術総合研究所【理事長 石村 和彦】(以下「産総研」という)センシングシステム研究センター【研究センター長 鎌田 俊英】ハイブリッドセンシングデバイス研究チーム 竹下 俊弘 主任研究員、山下 崇博 主任研究員、小林 健 研究チーム長は、オムロン株式会社【代表取締役社長 CEO 山田 義仁】(以下「オムロン」という) エレクトロニック&メカニカルコンポーネントビジネスカンパニーと共同で、世界最薄・最軽量のハプティクス用フィルム状振動デバイス(ハプティクスフィルム)を開発した。
現在、ゲームコントローラーやスマートフォンに用いられているハプティクス用アクチュエーターには偏心モーターや圧電セラミックスアクチュエーターが使われており、柔軟性とサイズの制約から曲面に沿った貼り付けやアレイ化が困難であった。産総研とオムロンは、極薄MEMS技術により厚さ7µmの世界最薄の圧電薄膜アクチュエーターを開発すると共に、これをアレイ化し、さらに振動を最大化するフィルム基板実装技術を実現して、より多彩な触覚を表現できるハプティクスフィルムを開発した。
この成果の詳細は2021年1月29日にオンライン開催されるIEEE MEMS2021 にて口頭発表される。

図1 (a)世界最薄のハプティクス用圧電薄膜アクチュエーター、(b)フィルム基板上に実装したハプティクスフィルム、(c)ハプティクスフィルムを曲面に沿って貼り付けたコントローラーのイメージ図
エンターテイメントやリモート技術の分野では、視覚、聴覚だけでなく触覚を再現するハプティクス技術により、リアルな臨場感が実現されるという期待が高まっている。現在のゲームコントローラーやスマートフォンの筐体に用いられるハプティクス用アクチュエーターには、偏心モーターや圧電セラミックスアクチュエーターが使われているが、サイズの制約からアレイ化が困難であること、立ち上がり速度が遅いこと、オンとオフのみの制御となってしまうことから、表現できる触覚には限りがあった。これらのアクチュエーターは筐体全体を振動させることが中心であり、表現できる触覚のバリエーションには限界がある。また、圧電セラミックスを用いたものは柔軟性に制約があり、曲面に配置した際の振動減衰が課題であった。一方、高分子からなるアクチュエーターは、柔軟性こそ有するもののパワーが小さいという問題があった。
産総研は極薄MEMSをフィルム基板に実装した極薄MEMS技術の研究開発を実施している。一方、オムロンは電子部品のスマート化(かしこい機械及び部品)を推進している。産総研とオムロンは多彩な触覚を生み出すべく、複数のアクチュエーターがフィルム基板上にアレイ化され、曲面に沿って貼り付け可能なハプティクスフィルムの開発を目的に、共同研究を実施している。
産総研とオムロンは、これまでに開発してきた極薄MEMSの柔軟性に着目し、従来の圧電セラミックスを極薄化することで、反応速度やパワーを維持したまま柔軟性も有する世界最薄のハプティクス用圧電薄膜アクチュエーターを開発した(図1)。
この圧電薄膜アクチュエーターはシリコン、金属電極薄膜、圧電薄膜、絶縁膜の多層構造からなる(図2)。圧電薄膜に直流電圧をかけるとアクチュエーター全体がたわみ、交流電圧をかけると振動する。主なハプティクス用アクチュエーターと今回開発した圧電薄膜アクチュエーターの特性を比較すると表1のようになる。圧電薄膜アクチュエーターの多層構造全体の厚さは7µmと非常に薄く、アルミホイルのような柔軟性をもつため、フィルム基板上に実装された状態でも曲面に沿って貼り付けることができる。

表1 ハプティクス用アクチュエーターの特性比較
この圧電薄膜アクチュエーターで振動を効率よく伝達して振動変位を最大化するには、アクチュエーターとフィルム基板を接合する振動伝達材料の機械特性が重要である。今回、この振動伝達材料の設計時に、実験を正確に再現できる高精度シミュレーション条件を確立した。これにより振動変位が最大となる振動伝達材料の機械特性を適切に設定することが可能となった。シミュレーションで得られた結果をもとに適切な振動伝達材料を用い、圧電薄膜アクチュエーターをフィルム基板上に実装してハプティクスフィルムを作製した。このハプティクスフィルムは、駆動電圧10Vで11µmの振動変位が得られるが、これは指先の知覚閾値1µmを十分に超えている。
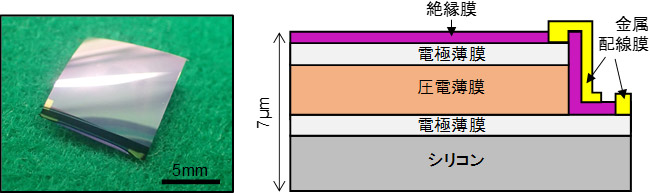
図2 圧電薄膜アクチュエーターの多層構造
さらに、4枚の圧電薄膜アクチュエーターをフィルム基板上にアレイ化したハプティクスフィルムを作製し、さまざまな振動パターンに対する指先の触覚認識テストを実施した。今回のテストでは4枚の圧電薄膜アクチュエーターを3種類のパターンで振動させ、それぞれのパターンについて識別率を算出した(図3)。その結果、正答率はパターンA(上下)で51.8%、パターンB(オンオフ)で97.5%、パターンC(左右)で57.6%となった。また、曲げた状態でも同様の触覚提示が可能であった。パターンA、Cの正答率が低いのは振動が強すぎるために上下と左右の違いを誤認したためと考えられ、駆動電圧の調整により最適化できると思われる。今回の結果は圧電薄膜アクチュエーターへの駆動電圧の大きさだけでなく、振動させるアクチュエーターのパターンで肌に与える感覚を多彩化できる可能性を示している。
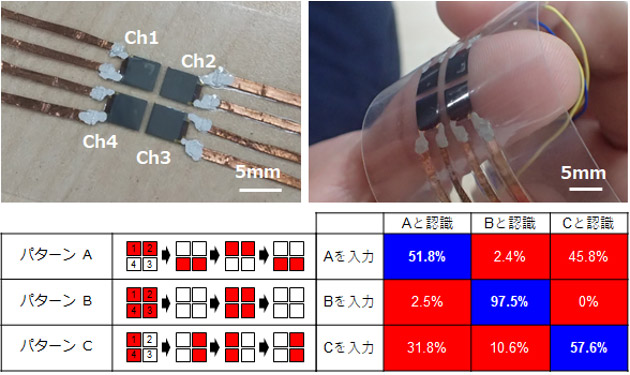
図3 圧電薄膜アクチュエーターをアレイ化したハプティクスフィルムによる振動パターン認識テスト結果
今後はより多数の圧電薄膜アクチュエーターをアレイ化したハプティクスフィルムを作製し、駆動電圧の強弱と信号波形だけでなく、パターンをさまざまに変えて多彩な触覚提示の実現を目指す。また、コントローラーやマウスといったヒューマンインターフェースデバイスなどへの搭載に向け、ハプティクスフィルムの高効率振動伝達パッケージ技術の開発を行う。このデバイスはさまざまなエレクトロニクス機器に搭載可能であり、ゲーム操作やパソコン操作だけでなく、リモートワークやエンターテイメント分野への展開を予定している。