株式会社 幸和製作所【代表取締役社長 玉田 秀明】(以下「幸和製作所」という)と、国立研究開発法人 産業技術総合研究所【理事長 中鉢 良治】(以下「産総研」という)ロボットイノベーション研究センター【研究センター長 比留川 博久】藤原 清司 主任研究員、知能システム研究部門【研究部門長 河井 良浩】今村 由芽子 研究員らは共同で、転倒防止機能を持つロボット歩行車を開発した。
従来の歩行車は利用者の転倒を防止する機構を備えておらず、歩行車からの転落や歩行車ごと転倒するリスクがあった。開発した歩行車は転倒動作シミュレーションに基づいて設計され、転倒の初動を抑制することにより転倒を防止する機構を備える。転倒防止機構の有効性は、人型ダミーを用いた試験により検証した。
介護施設などでは転倒リスクのある要介護者の移動時に車椅子を用いることが多く、それにより、要介護度が重度化する「作られた寝たきり」の増加が課題となっていた。今回開発した歩行車の利用により、転倒リスクのある要介護者が安全に歩くことが可能となり、要介護度の重度化を予防する自立支援介護、総介護費用の増加抑制が期待される。今後は実証実験を続け、2021年2月までに実用化を目指す。
なお、この技術の詳細は、2019年12月9日にイイノカンファレンスセンター(東京都千代田区)で開催される産総研ロボットイノベーション研究センター成果発表会で発表される。
2003年に370万人だった要介護者数は、2017年には630万人に増加し、その間介護保険総費用額は5.7兆円から10.8兆円に増加している。必要な介護者も2025年には34万人不足すると予測されるなか、要介護度の重度化予防などの対策を含め、介護サービスの維持は喫緊の課題となっている。
廃用症候群による要介護度の重度化を予防する観点では、自立的な歩行が重要であるが、従来の歩行車は利用者の転倒を防止する機構を備えておらず、歩行車からの転落、歩行車ごと転倒するというリスクがある事から、多くの介護施設では、車椅子での移動が中心となっている。
幸和製作所は、厚生労働省平成29年度介護ロボットのニーズ・シーズ連携協調協議会設置事業を受託し、転倒防止ロボットのコンセプトを提案してきた。
産総研は、デジタルヒューマンモデルを用いた人の運動のシミュレーション技術の開発、生活支援ロボットの安全検証技術の開発に取り組んできた。2014年には生活支援ロボットの国際安全規格ISO 13482の制定に貢献、生活支援ロボット安全検証センターを開設し、ISO 13482の認証スキームの開発にも協力するとともに、ロボット介護機器開発ガイドブックなどを作成・無償配布を行ってきた。
これらの研究成果に基づいて、今回の開発は戦略的基盤技術高度化支援事業の補助事業「座らせきり介護ゼロを目指す自立支援型転倒防止ロボット歩行車の研究開発(2018〜2019年度)」による支援を受けて行った。
歩行車に適切な転倒防止機能がないという課題の解決を図るため、① 歩行車ごと転倒しないような安定性と要介護高齢者でも利用可能な操作性を両立すること、② トイレを含む狭隘な生活空間で利用可能なこと、③ 車椅子で移動する場合と同等以下の転倒リスクと介護負担により移動できること、④ 歩行中は介助なしで利用できること、を設計仕様とした。①と②を実現するためには、歩行車が小さな支持基底面でも転倒しないような重量を持つことと十分に小さな力で操作できることを両立する必要がある。そこで、デジタルヒューマンモデルを用いて、歩行車に対する利用者の相対的な立ち位置や姿勢を変化させ、利用者が歩行車に与える接触力とモーメントを解析し、最も不安定となる状態で、歩行車の車輪が床を離脱するかどうかを評価し、歩行車の重量を設計した。図3はシミュレーションのモデル、図4左は利用者が歩行車に与える力、図4右は歩行車と床面から利用者に与える力の計算例である。本項目は産総研が担当した。
操作性に関しては、左右駆動輪を利用者の足位置付近に配置し、足位置を中心に両輪が逆回転することにより旋回が可能な構成とするとともに、両輪をパワーアシストすることにより実現した。パワーアシストは、車輪の速度検知に基づくトルク制御により実現し、床面傾斜検知により左右輪のバランス制御を行っている。
また、③と④について、従来技術ではハーネスにより全身を支える方法、ベストにより上半身をつり下げる方法があったが、前者ではトイレで衣服の着脱ができない、後者では利用者の前方の支持機構が大きく、洗顔などの生活動作ができないという課題があった。今回の開発では、転倒は利用者の重心の床への投影点が支持基底面の中心から境界へ偏倚することに関係して発生することに着目して、この重心偏倚の初動を抑制する機構を開発した。この機構は、脇下には接触せずに近接して上体部を囲むとともに、後方への転倒を防止するため背面を支持し、転倒6モードのそれぞれに有効となる転倒防止機構となっている。駆動輪の設計・パワーアシストと、転倒防止機構は、幸和製作所が開発した。
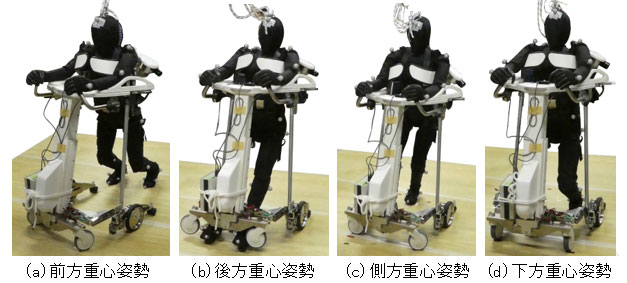
この機構の有効性を検証するため、第1次試作機により人型ダミーを用いた転倒実験を横浜市総合リハビリテーションセンターにて実施した。今回の開発で製作した人型ダミーは、身体の各部寸法や重量配分、関節可動域は高齢者の計測統計情報に準じて設計されており、全身に33以上の自由度を備える。膝などの関節硬さを変更可能で自立姿勢をとることもできるほか、歩行車使用時の転倒に着目し、歩行車の間をすり抜けて崩れ落ちる挙動を再現するため、脇下に機構的なひっかかりがない構造となっている。人型ダミーを用いた転倒実験の様子を図5に示す。図6は、後方重心姿勢による転倒実験時の重心の床への投影点の軌跡を示している。左は第1次試作機を用いた場合で、ダミーが後ろに倒れると歩行車も後ろに移動し、ダミーの重心投影点が支持基底面内に止まっているのに対して、右の通常の歩行車による実験では、ダミーが後ろに倒れると足に押されて歩行車が前に移動して、ダミーの重心投影点は支持基底面の外に出て転倒に至っている様子が分かる。
 |
|
図5 人型ダミーを用いた転倒実験の様子 |
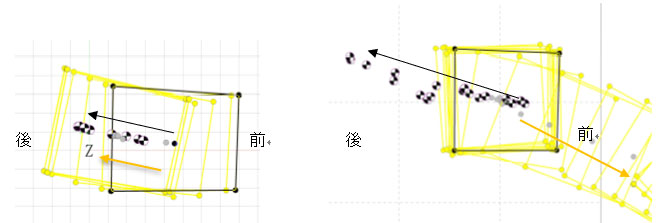 |
図6 重心移動軌跡(白黒点が重心投影点、黒枠が支持基底面初期位置、黄色がその軌跡)
(左)今回開発した歩行車、(右)通常の歩行車 |
人型ダミーの初期位置や姿勢を変更してさまざまな条件で転倒実験を行った結果、人型ダミーが歩行車から落下する場合は一度もなかった。歩行車ごと転倒するリスクについては、後方重心姿勢で転倒させた場合に、足先が歩行車の下に潜り込んで歩行車の前方が床面との接触を失う場合があった。このため、今回の試作機では膝をサポートする機構を追加した。人型ダミーの開発は産総研が、転倒実験は幸和製作所が担当した。
製品としての安全性を評価するため、JIS T 9265:2012に基づく静的安定性試験(図7)、転倒事象再現装置による牽引試験(図8)を市販の歩行車を用いて実施しており、試作機でも同様の実験を行う予定である。
さらに量産モデルの開発を行い、特別養護老人ホームや有料老人ホームと協力して実証試験を行い、その結果が良好であれば、2021年2月までに実用化することを目指している。