国立研究開発法人 新エネルギー・産業技術総合開発機構【理事長 古川 一夫】(以下「NEDO」という)のプロジェクトにおいて、国立研究開発法人 産業技術総合研究所【理事長 中鉢 良治】(以下「産総研」という)地圏資源環境研究部門 光畑 裕司 研究部門長、物理探査研究グループ 上田 匠 客員研究員、知能システム研究部門【研究部門長 河井 良浩】フィールドロボティクス研究グループ 加藤 晋 研究グループ長、神村 明哉 主任研究員らは、株式会社 エンルート【代表取締役社長 瀧川 正靖】(以下「(株)エンルート」という)、株式会社 日立製作所【執行役社長兼CEO 東原 敏昭】(以下「(株)日立製作所」という)、八千代エンジニヤリング株式会社【代表取締役社長 出水 重光】(以下「八千代エンジニヤリング(株)」という)と共同で、土砂災害時に地中に埋没した車両を空中から探査するシステムを開発した。
本システムはドローンと地下電磁探査センサーで構成される。探査センサーをつり下げて安定航行するための技術と、より正確に埋没位置を特定するためのさまざまなセンサーにより、自動飛行による網羅的な探査や手動操縦による精密な探査ができる。ヘリコプターと比べて、狭いエリアにアクセスでき、低空飛行でより細かな探査が可能となる。今回、実際に車両が埋設された静岡県内の実験サイトで検証実験を行い、地下1.5 mの土砂内の埋没車両の位置の特定に成功した。今後、斜面などの実現場に近い環境下で本システムの適用可能性を探る実験を重ね、実用化を促進し、災害時に備えて普及させることで、人の立ち入りが困難な災害現場での救出活動の迅速化に貢献することを目指す。
 |
|
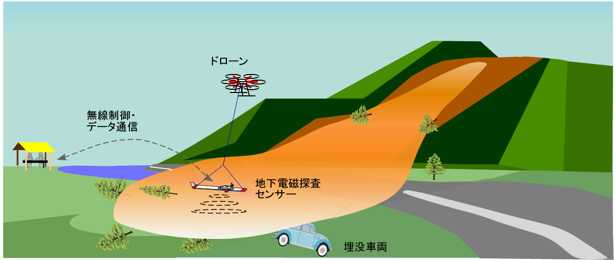
開発したシステムによる土砂災害現場での埋没車両の探査イメージ |
2016年の熊本地震による南阿蘇村立野地区での土砂災害や、2004年の新潟県中越地震に伴って発生した長岡市での土砂災害では、人命救助のために土砂に埋没した車両の迅速な探査が必要であったが、二次災害の懸念もあり、人の立ち入りが難しい状況での車両探査作業は非常に困難であった。
また、地震による土砂災害だけではなく、近年はゲリラ豪雨などの不安定な気象に起因する土砂災害が頻発している。例えば国土交通省によると2016年には1492件の土砂災害が発生しており1、今後、迅速な人命救助のための埋没車両の探査が必要となる懸念もある。
近年、災害現場で活用できるドローンの開発が盛んに行われている。ドローンは、空撮や測量、農薬散布、インフラ点検の分野での利用が進んでいるが、今後の災害対応の分野でも、人の活動が困難な災害現場で、ドローンを用いて埋没車両位置を探査できる技術の開発が期待されている。
産総研は、 (株)エンルート、(株)日立製作所、八千代エンジニヤリング(株)と共に、NEDOのプロジェクト※において、土砂災害および火山災害時に無人航空機や無人車両を用いて地形調査や地質調査を実施する技術の開発を行っている。地面に触れずに地下の様子を調査する物理探査法の一種である電磁探査法を用いて、ドローンによる地質調査を目指しており、ドローンを用いた空撮や地形調査は既に一般的になっている一方で、地質調査の試みは世界的にも先駆的である。
今回、プロジェクトの一環として埋没車両の探査に、ドローンを利用した技術の開発を進め、車両を埋設した実験サイトをもつ一般社団法人 日本建設機械施工協会 施工技術総合研究所(以下「施工総研」)において検証実験を実施した。
※NEDOのプロジェクト
プロジェクト名:インフラ維持管理・更新等の社会課題対応システム開発プロジェクト(2014年度~2018年度)
研究テーマ名:災害調査用地上/空中複合型ロボットシステムの研究開発(2014年度~2017年度)
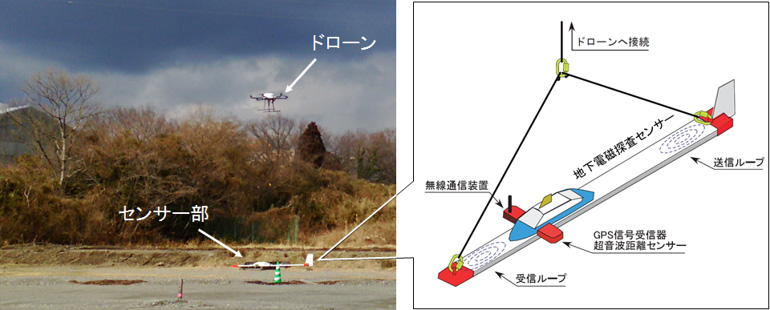
今回、ドローン部とセンサー部から成るドローンつり下げ型の電磁探査による埋没車両位置特定システムを開発した。システムのセンサー部は、地盤内の比抵抗分布を地表から計測でき、地下に埋没した金属物体の探査ができる。長さ1.6 mの地下電磁探査センサー、位置情報収集用のGPS信号受信器、センサーの制御と計測データのモニタリングのための無線通信装置、地下電磁探査センサーの対地高度をモニタリングする超音波距離センサーで構成される(図1)。
 |
|
図1 ドローンつり下げ型電磁探査システムによる航行計測の様子(左図)とセンサー部(右図) |
センサー部を、ドローンからつり下げて、航行しながら計測するには以下のような課題が懸念された。
①比較的重量のあるセンサー部(総重量4.5 kg)をつり下げての安定飛行
②ドローンのモーターから発生する電磁ノイズの地下電磁探査センサーへの影響
③風などの影響によるセンサー部の水平方向の回転
④地表の小さな起伏や突風などの影響によるセンサー部の対地高度の変動
さらに、埋没車両の位置を災害現場で迅速に特定するには、以下の機能が必要である。
⑤航行計測中の計測データのリアルタイムモニタリング
⑥現場での迅速なデータ処理と可視化
課題①については、(株)エンルートが開発した最大積載可能重量が6.6 kgであるマルチコプターZION CH940を採用した。課題②の、電磁ノイズの影響を回避するには、ドローンとセンサー部の距離を離せばよいが、距離が離れすぎるとセンサー部が振り子のように揺れて、ドローンの航行が不安定になってしまう。そこで、電磁ノイズによる影響を評価するために、ある固定地点でドローン部とセンサー部の距離を3 m、4 m、5 mと変化させて、探査センサーのデータを計測し、そのばらつきを表す標準偏差を算出した(図2)。ドローン部とセンサー部の距離が5 mの場合にばらつきが最も小さく、電磁ノイズの影響が小さいと考えられるが、航行時の不安定性を考慮し、開発したシステムでは、ドローン部とセンサー部の距離を4 mとした。
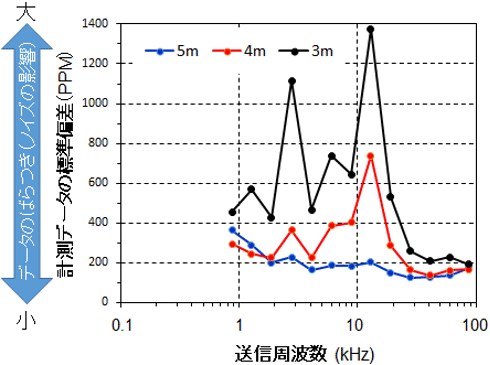 |
図2 ドローン部とセンサー部の距離を3 m、4 m、5 mと変化させて計測した探査データの標準偏差
ある固定地点でドローン部の対地高度を15 mに保ち、約20秒間、計測した探査データ(170サンプル)を使用。 |
課題③については、センサー部がドローンの航行方向を向くように、センサー部の片端に垂直尾翼を装着した(図1)。装着した垂直尾翼による回転抑制効果は、ドローンの航行速度にも依存し、ドローンの航行速度を1 m/sから5 m/sに変化させた場合の回転抑制効果の観察から、少なくとも2 m/s以上の速度が、回転抑制には必要であることを確認した。 課題④のセンサー部の対地高度については、地下電磁探査センサーが地面に近すぎると地盤の導電性の影響を受けて計測データに金属物体と同様の異常を示す場合があり、これを避けるためにはセンサー部の対地高度を1 m程度に保つ必要がある。また、ドローンにもレーザー高度計を装備してドローン部の対地高度を一定に保つよう制御しているが、小規模な地表の起伏や突風などの影響による対地高度の変動は避けられない。そこで、今回、センサー部に距離センサーを取り付けて常にセンサー部の対地高度をモニタリングして、対地高度が小さい場合に計測された探査データは使用しない方針とし、今回の実証実験では対地高度が70 cm以上の場合のみの探査データを採用した。
課題⑤のリアルタイムモニタリングは、航行中のセンサー部の正常動作を確認する上でも重要なため、地下電磁探査センサーの制御やデータ伝送を無線化する装置を作製し、センサー部に装着した。また、課題⑥に関しては、計測した探査データとセンサー部の位置や対地高度の情報を調査現場で統合し、探査データを可視化するソフトウェアを開発した(図3)。このソフトウェアはGISを用いて測定データを航空写真に重ね合わせて表示する機能も備えており、車両の埋没箇所を災害現場で特定できる。
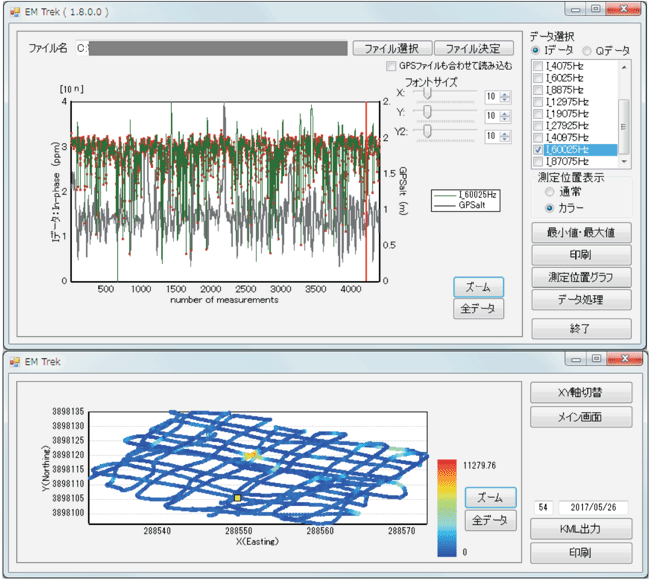 |
図3 電磁探査データの処理・表示ソフトウェア
(上段)探査データ(緑色)と対地高度データ(灰色)のプロファイル表示、(下段)探査データを航行軌跡に沿って表示させた図。 |
次に、開発したシステムを用いて、施工総研で実証実験を行った。
施工総研には、軽自動車2台を地下1.5 m(浅部)と3 m(深部)に埋設し、埋没車両探査を模擬できる実験サイトが整備されている(図4)。今回、この実験サイトで、ドローンにセンサー部をつり下げて、航行速度約2 m/s、センサー部の対地高度を約1 mで航行させて計測する実験(ドローン航行計測)を行った。実験では、探査対象エリアを比較的粗い飛行間隔で網羅的に探査する広域探査と、それにより抽出された特定のエリアをより細かな飛行間隔で詳細に探査する精密探査の2種類の実験を実施した。
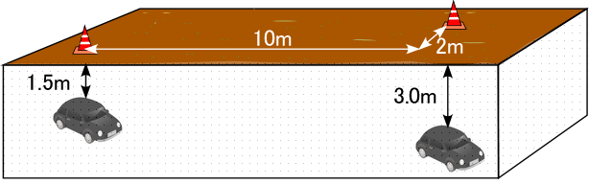 |
図4 施工総研の埋没車両実験サイトの車両埋設の配置
2台の軽自動車が、深さ1.5 mと3.0 mの地中にそれぞれ埋設されている。 |
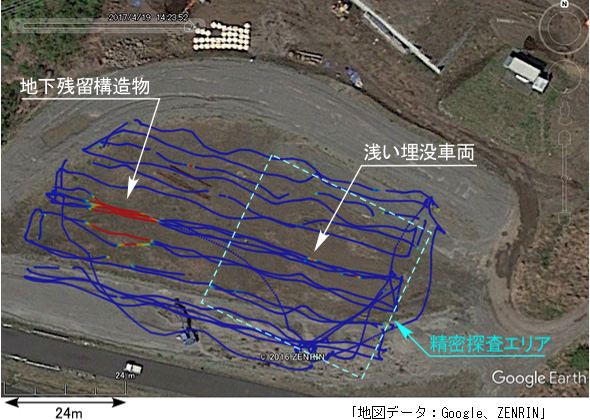
まず、広域ドローン航行計測で約70 m×35 mの実験サイト全域を測定したところ、以前建設されていた実験施設で地下に残された構造物は検知できたものの、浅部の埋没車両は僅かに把握できる程度であった(図5)。そこで、精密ドローン航行計測を行い、埋没車両によると思われるデータを検知したエリアを細かく航行した。その結果、今度は浅部の埋没車両を明瞭に検出でき、深部の埋没車両も僅かながら検出できた(図6)。
 |
|
図5 広域ドローン航行計測による探査データ(測定周波数60 kHz)
ドローン航行軌跡に沿って探査データの振幅を青線で表示。(ただし、センサー部の対地高度が70 cm以上の場合だけを表示した)。過去に建設されていた実験施設の地下残留構造物のある箇所が顕著に検出できた。また、浅部にある埋没車両も検出できた。 |
 |
|
図6 精密ドローン航行計測による探査データ(測定周波数60 kHz)
ドローン航行軌跡に沿って探査データの振幅を表示。(ただし、センサー部の対地高度が70 cm以上の場合のみを表示した)。浅い埋没車両を明瞭に検出するとともに、深部の埋没車両も小さいが検出できた。 |
今回の実証実験のように、ドローンを使用しての埋没車両探査の報告は見当たらず、今回の実験での成功例により、実用化への道が開かれたと言える。今後、本システムの更なる改良を行うことで、災害現場で埋没車両を探査する技術として救助の迅速化に貢献できる可能性がある。
実際の災害現場は地形が急峻な場合が多いため、センサーをつり下げた状態での航行が不安定になる可能性がある。今後はより実際の状況に近い、起伏の大きな地形の実験サイトでの実証試験を行い、システムの改良を継続する必要がある。また、今回開発した技術を民間企業などに橋渡しし、災害時に役立つ技術となるよう実用化を促進する。