独立行政法人 産業技術総合研究所【理事長 野間口 有】(以下「産総研」という)知能システム研究部門【研究部門長 比留川 博久】タスクビジョン研究グループ 河井 良浩 研究グループ長、関西産学官連携センター【センター長 田口 隆久】富田 文明 招聘研究員らは、株式会社 ニッコー【代表取締役 佐藤 厚】(以下「ニッコー」という)と共同で、農水産物を自動加工するための全周3次元計測システムを開発した。
このシステムは、不定形な加工対象物をベルトコンベヤーで搬送しながらその全周3次元形状を計測し、対象物を一定の大きさに切り揃えるための自動加工データを、測定した形状データに基づいて生成することができる。また、解凍されて柔らかくなったり、凍結していびつな形状になったりした鱗つきの魚フィレをはじめ、豚バラ肉など、これまでは正確な形状計測が難しかった多様な品目の農水産物を扱うことができる。このシステムにより、農水産物加工品の歩留まりの向上や生産性向上への貢献が期待される。
なお、このシステムは、平成23年6月7~10日に東京都江東区の東京ビッグサイトで開催される2011国際食品工業展(FOOMA JAPAN 2011)にニッコーより試作機が出展される。
 |
|
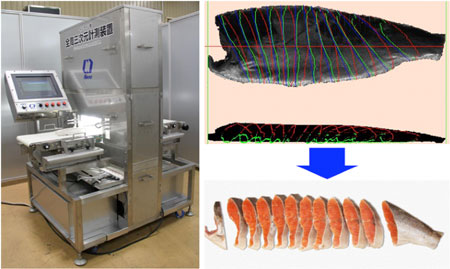
農水産物の全周3次元形状計測システムと測定例、加工例
|
食品加工業界では、昨今、農水産物などの原材料費の高騰にともない、加工製品の歩留まりを向上できる加工技術への要求が増している。一方で、熟練工の高齢化が進んでいることから、機械による安定した加工ができる自動加工システムが求められている。しかし、農水産物は、同一品種であっても状態や形状が異なるため、これまでは重量や形状の高精度な計測が困難であった。そのため、歩留まりの高い農水産物自動加工システムは実現していなかった。
ニッコーは、さまざまな農水産物加工システムの製造・販売を行っているが、魚フィレの自動加工機では、解凍された柔らかい魚フィレや凍結していびつな形の魚フィレに対して安定した形状計測ができず、しかも上面しか計測できなかったため、正確な加工ができないという問題を抱えていた。また、さらなる製品展開を図るにあたり、さまざまな農水産物の形状を正確に計測する技術を模索していた。
一方、産総研では、多種多様な物体に対する計測・認識技術「高機能3次元視覚システムVVV」の技術開発を行ってきており、製造業をはじめ、サービスロボットへの展開など技術の社会還元を行ってきた。
今回、両者のニーズとシーズが合致したことから、ステレオカメラによる3次元形状の計測技術によって既存製品の問題解決を図る共同研究を進めることとし、今回のシステムの開発に至った。
なお、本研究開発は、経済産業省 中小企業産業技術研究開発事業「中小・ベンチャー企業の検査・計測機器等の調達に向けた実証研究事業(平成19~21年度)」による補助を受けて行った。
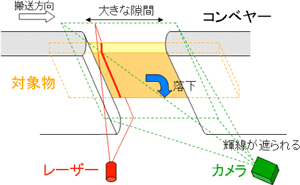
魚フィレは、下面でもワタ抜きされている部分は平面ではなく湾曲しているため、3次元形状を得るためには、上下両方向から同時に計測する必要がある。下面部の計測は、従来の上面部の計測と同様に、レーザー光を照射しカメラで撮影する光切断法を検討した。ベルトコンベヤーを2台並べてその隙間から計測する必要があるが、その際にはレーザー光の面が隙間方向に照射される必要がある。カメラをレーザー光の面に近づけると原理的に精度が悪化してしまうため、図1(a)のようにカメラを光源からベルトコンベヤーの搬送方向に離して配置しなければならない。しかし、隙間を狭くするとベルトコンベヤーの厚みがレーザー光を遮ってしまうため計測ができず、逆に隙間を広くすると魚フィレが落下したり、隙間に引っかかってスリップしたりしてしまう問題があった。
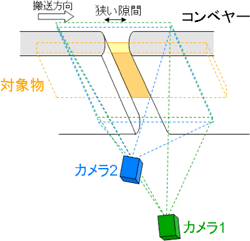
そこで今回、計測機器としてステレオカメラを用い、ステレオ相関法を採用することによって、ベルトコンベヤーの隙間を狭くしても安定して計測できるシステムを開発した。この方法では隙間と平行にカメラを配置できるため(図1(b))、ベルトコンベヤーの隙間を狭くして、魚フィレを安定して搬送することが可能になる。計8台のカメラ(4セットのステレオカメラ)を使用し、搬送されていく魚フィレの表面を輪切りにするように上下4方向から計測する。頭から尻尾までのデータをつなぎ合わせると、魚フィレの全周3次元形状の計測結果が得られる(図2)。
 |
 |
|
(a) 光切断法(これまでの方法)
|
(b) ステレオ相関法(今回開発した手法)
|
|
図1 3次元形状計測手法の概略図
|
 |
|
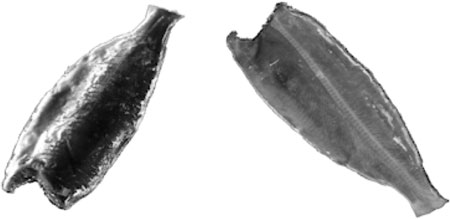
図2 魚フィレを全周3次元形状で計測した結果(上下面)
|
魚フィレは凍結状態や水の濡れ具合によって表面に光沢を生じ、光を正反射させることがある。一方で背側では鱗の黒い部分は光を反射しにくく、これらは3次元形状計測の妨げとなる。そこで正反射の影響を軽減するため、陰影が濃くなるように光源の配置を工夫したうえで、明るさの分布情報を利用し、さらに物体表面の連続性を仮定することで、手掛かりが少ない黒色部分でも安定して計測できるステレオ画像処理のアルゴリズムを開発した。
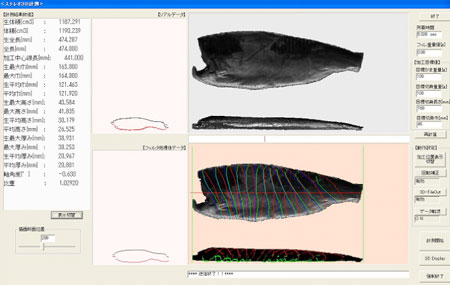
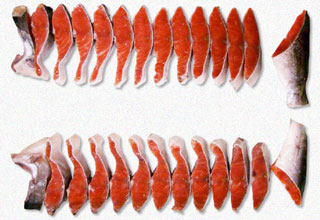
このようにして魚フィレの全周3次元形状をベルトコンベヤーで搬送しながら計測できる「全周3次元計測システム」を開発した(図3)。このシステムは最高8.3 m/分の搬送速度でも、高さ方向±1 mm以内の高精度で全周3次元形状計測ができ、例えば全長440 mmの鮭フィレの場合、6秒未満(搬送時間含む)で全周3次元形状データが得られる。切り身一切れ分の重さや切り方などの情報を与えると、測定した形状データを基に、図4のような加工情報を計算できる。本計測システムの後段に自動加工機を組み合わせると、図5に示すように重さが均一の切り身を自動で作成できる。従来機では安定して計測ができなかった解凍された魚フィレに対しても十分な加工精度が得られるような全周3次元形状計測ができるシステムである。なお、カメラ設定などを変更することで、豚バラ肉の定貫切りなど、さまざまな農水産物の加工のための3次元形状計測にも適用することができる。
 |
|
図3 全周3次元形状計測システム
|
 |
|
図4 計測結果に対する加工情報生成
|
 |
|
図5 加工機により均等な重さに切られた鮭切り身
|
今後は全周3次元計測システムの製品化を目指し、ニッコーにおいて、本システムの頑健性の向上、高速化および低コスト化を進める予定である。