独立行政法人 産業技術総合研究所【理事長 野間口 有】(以下、「産総研」という)知能システム研究部門【研究部門長 比留川 博久】統合知能研究グループ【研究グループ長 神徳 徹雄】谷川 民生 主任研究員らは、産総研 情報技術研究部門【研究部門長 関口 智嗣】、産総研 スマートグリッド通信制御連携研究体【連携研究体長 樋口 哲也】、国立障害者リハビリテーションセンター研究所【研究所長 加藤 誠志】(以下、「国リハ」という)、株式会社 ミサワホーム総合研究所【代表取締役社長 上野 彰一】(以下、「ミサワ総研」という)と共同で、障害者が各種の福祉機器を自ら組み合わせ、一体的に扱うことができるシステム構築技術を開発し、障害者の一人ひとりに対応する住環境モデルの提案と実証試験を行った。
今回、実証試験を行ったシステムでは、ロボットモジュール用共通ネットワークプラットフォーム技術「RT(Robot Technology)ミドルウエア」を用いて、さまざまな制御方法が混在する入出力機器がネットワーク化されている。これにより、容易にネットワーク上に機器を追加・削除でき、機器間の連携動作が可能となるため、利用者の要求に応じて装置を適宜組み合わせることができる。
今回のシステムには、機器操作用高機能インターフェースとして、個々の障害者の運動機能に応じてカスタマイズできる高速応答性能をもつステレオビジョン技術によるジェスチャーインターフェースや、生活環境で発生する雑音に強く、不明瞭な発話も認識可能な音声認識インターフェースも組み込んだ。さらに、物理的支援を行うため、住宅設備を手軽に動かすことができるアクティブキャスターを住環境に組み込んでいる。
各種の福祉機器の評価は臨床機関である国リハとともに進め、住環境への導入はミサワ総研とともに進めた。これらの技術による住環境モデルは、障害者の自立生活を支援し、介助者の負担軽減や障害者自身の社会参加につながるものと期待される。
 |
|
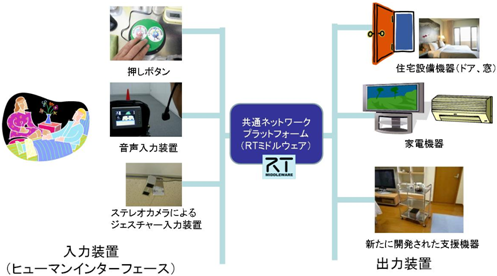
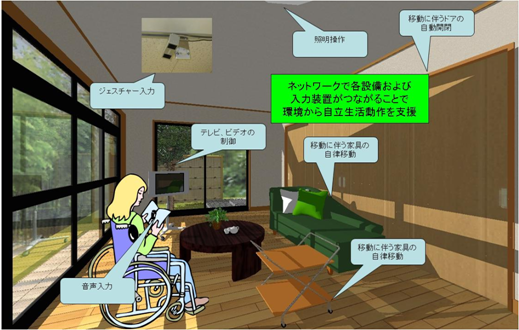
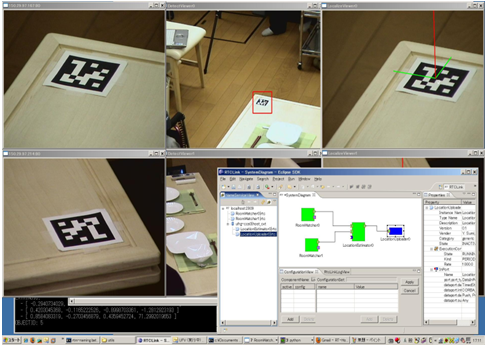
図1 RTミドルウエアを介した各種福祉機器のネットワーク化(上)と
それを導入した障害者自立生活支援住環境モデル(下)
|
現在のさまざまな福祉機器は、障害者の個々の状態に合わせた機能を持つシステムとして開発されているため、結果として高価になっており、障害者の生活の質の向上を阻害する問題の1つとなっている。
その一方、近年、ネットワーク技術が進み、通常の一体型の機器でも、機器内部にネットワークが用意され、モジュール化された各機能が機器内部のネットワークを介して接続された構成になりつつある。このような構成の機器では、新製品などの機器開発が容易であり、開発サイクルが短縮されコストが削減できるといったメリットがある。このシステム開発の概念を福祉機器開発に導入することで、一人ひとりに対応した福祉機器を安価に提供できるようになることが期待されている。
産総研は、ロボットに関する研究開発を通じて生活の質の向上に貢献することを目指しており、人間を支援するためのさまざまなロボットを開発している。その1つとして、ユビキタス・ロボティクスというコンセプトで、住環境をロボット化した空間型ロボットの開発を進めている。また、さまざまなロボット要素部品(RT要素)をモジュール化し、それらを統合したシステムの構築を容易にするRTミドルウエアの開発も行っている。一方、福祉機器の分野においては、脳性マヒなどでうまく言葉を話せない人でも入力可能な音声認識システムの開発や、ステレオカメラを利用したジェスチャー入力装置の開発など、ヒューマンインターフェース機能の研究開発にも取り組んでいる。これらは高度な技術であるが、多くの障害者に利用されるには、障害者に合わせて自在に組み替えられる機能を持つシステムが必要となる。今回、在宅で自立・自律した生活が困難、あるいは問題を抱えている障害者を支援することを目的として、厚生労働省「障害者自立支援機器等研究開発プロジェクト」(平成21年度)の下、RTミドルウエアといった共通のネットワークプラットフォームを介することで、産総研で開発されている各種の福祉機器の連携動作を可能とし、そのシステムを障害者の特性に合わせて住環境に導入する研究開発を進めてきた。
障害者の生活の支援につなげるため、ヒューマンインターフェース機能に関する技術として、ジェスチャー入力装置、音声入力装置を開発した。
ジェスチャー入力装置(図2)は、ステレオカメラを用いて人の動作を検出するため、刻々と変化する人体形状を3次元的に高速計算し、非接触かつ非拘束で高度な動作識別機能を実現している。このため、身体機能の障害でリモコンや機器を操作することができない人でも、手や肩、頭部の動きによって操作することができ、ユーザーの実状に適した操作環境を提供することができる。また、進行性の病状を持つ場合の動きの変化に対してもソフトウエアに調整を加えるだけで適応可能である。さらに、システムの高速性を活かし、生活機器の操作だけでなく、娯楽や運動機能のリハビリにも適用可能であることを実証するため、手振りジェスチャーや肩ジェスチャーによる機器操作により、テニスゲームを行う実験を行った。これにより障害者と健常者が垣根なく同時にゲームを楽しめる環境を実現できることが実証された。
 |
|
図2 ジェスチャー入力装置用ステレオカメラ(左)とジェスチャー認識結果(右)
|
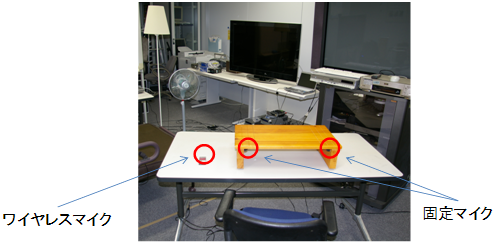
音声入力装置(図3)は、運動機能および発話に障害を持つ人でも操作できる電動車いすの研究開発(平成16年度~18年度)において実現した、周囲の雑音に強く、不明瞭な音声でも認識可能な音声認識技術を住宅設備の操作ツールとして導入し、他の入力装置とも連携動作する機能を実現した。
 |
|
図3 不明瞭な音声でも認識可能な音声入力装置
|
また、障害者に対する物理的な支援となる出力装置として、キャスターにモーターを組み込んだアクティブキャスターを開発した(図4)。移動させたい物にアクティブキャスターを固定することで、遠隔から容易に操作することができる。対象物の重量や大きさによって複数のアクティブキャスターを固定することになるが、ユーザーが適当な位置に取り付けても、その位置を自動計算するので遠隔から動作させることが可能であり、ユーザーのニーズに応じてさまざまな物に取り付けることができる。
 |
|
図4 アクティブキャスターの取り付け(左)とリモコンによる配膳カートの遠隔操作(右)
|
さらに、ジェスチャー入力装置やアクティブキャスターなどの機器をRTミドルウエアを介することで相互に連携動作させるシステムを構築した。これにより、開発された福祉機器を必要な機能に応じて組み替えることによって、一人ひとりに対応した福祉機器を提供することができる。また、各種の福祉機器をネットワーク上に分散配置することができれば、例えば部屋全体に各機能を分散配置し、住環境全体を1つの福祉機器システムとして考えることができる(図5)。
 |
|
図5 RTミドルウエアを介した各機器が連携動作するシステム構成図
|
この技術を利用したシステムが、さまざまな障害者に対応できることを示すために、以下の3つの住環境モデルを構築した。
① 歩行困難な肢体不自由者を支援する住環境モデル(住宅設備操作支援システム)
② 脳卒中後遺症による脳機能障害者の調理訓練を支援する住環境モデル(調理支援システム)
③ 視覚障害者を支援する住環境モデル(住環境変化を検知する環境管理システム)
① 歩行困難な肢体不自由者を支援する住環境モデル(住宅設備操作支援システム)
主に車いすで生活している肢体不自由者の住環境における課題としては、家具が車いすの移動の際に邪魔になること、ドアの開閉が自在にできないこと、家電製品を手軽に制御できないことなどが挙げられる。これに対して、ジェスチャー入力装置、音声入力装置といったヒューマンインターフェース機能を介して、住環境内にある住宅設備として、テレビ、ビデオ、エアコンなどの家電機器のリモコンや、アクティブキャスターを組み込んで自動化された家具やドアなどを制御できる住環境モデル(図6)を示す。これら各機能を持った福祉機器を連携動作させることで、例えば車いすの移動の際に邪魔な家具を自律的に移動させ、通路を確保するといった住環境の能動的な制御を行うことができる。
 |
|
図6 住宅設備操作支援システム
|
② 脳卒中後遺症による脳機能障害者の調理訓練を支援する住環境モデル(調理支援システム)
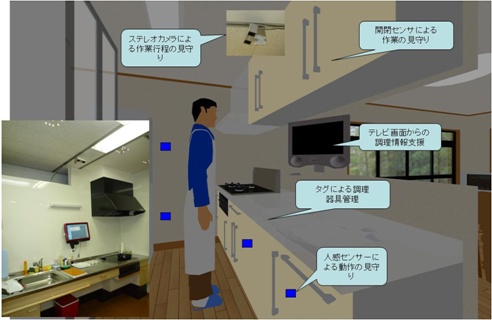
本支援モデルは、身体的な障害は無いが、脳卒中後遺症による高次脳機能障害を持つ人を対象としている。厚生労働省の調査報告(平成20年度患者調査の概況)によると、脳卒中に代表される脳血管疾患の総患者数は133.9万人で、悪性新生物(がん)の総患者数151.8万人に匹敵する人数となっている。脳血管疾患や外傷性脳損傷等により脳が損傷したことに起因する認知機能の障害は高次脳機能障害と呼ばれている。その症状として、注意障害、記憶障害、遂行機能障害などが挙げられる。これらのリハビリ訓練の1つとして、調理訓練が一般的に利用されている。また、自立した生活を進める上でも調理の支援は重要である。キッチンに各種センサーを配置し、調理の状況を見守りつつ、調理計画情報を提示する情報端末と連動させることで、一人で自立して調理できる環境を作り、脳機能障害者の訓練にも利用できる調理支援システム(図7)を示す。調理支援システムは、調理プロセスを提示する情報支援ツールと、その調理プロセスを見守る各種センサー類からなる。情報支援ツールは、キッチンに備え付けたPCを介して、調理プロセスを支援対象者に常に指示し、タッチパネルを通して作業を確認することで指示通りに調理を実行できるツール(図8)である。また、それらの調理プロセスが安全に進められているかを、キッチン環境に設置した各種センサーにより確認し、調理プロセス提示ツールとの連携を行うシステムとなっている。
 |
|
図7 脳卒中後遺症による脳機能障害者に対する調理支援システム
|
 |
|
図8 調理プロセス提示画面
|
③ 視覚障害者を支援する住環境モデル(住環境変化を検知する環境管理システム)
視覚障害者は自身の自宅環境においては、障害を受けてからの期間が長いほど、健常者に近い生活をすることが可能である。それは日々の生活を重ねていく中で自宅環境のモデルが視覚障害者自身の中に正確に構築されていくからである。しかし、来客などによって自宅の環境が変化すると、そのモデルとの差異が起こり生活に支障が生じる。この問題に対し、ウェブカメラと無線タグにより、家具やドアといった住環境を構成する要素の位置などを定期的に計測し、視覚障害者のもっている通常環境のモデルからずれた場合にその状況を提示するシステム(図9)を示す。このシステムは家具に取り付けられたマーカーを認識することで家具の位置を取得するウェブカメラと、電波強度によりカメラで撮ることのできない部分の家具などの位置を計測するための無線タグからなる。また、鍵やリモコンと言った小物の場所を提示するために、通常の通信用タグにブザーを取り付けることで、捜し物の支援を行うシステムも取り入れている。
 |
|
図9 WEBカメラによる環境変化計測システム
|
今後は既に事業化されている福祉機器も含めてモジュール化し、共通ネットワークで利用できるようにすることで、障害者に限らず、高齢者や健常者の生活の質も向上できるシステムをユーザーレベルでも手軽に構築でき、安価に購入できるといった、モジュール化に係る技術開発ならびに標準化活動を進めていく。また、開発された技術を早くユーザーに提供するためには、ユーザーと開発側、臨床側とが協働できる拠点が重要であり、臨床機関である国リハを中心として、ユーザーからの意見を開発者側に反映できる研究開発システムを構築する。また、今後のビジネスモデルとして、住宅の機能自体も静的なものから、センサーやアクチュエーターを積極的に導入し、部屋の間取りさえも能動的に変化させ、障害者に合わせた住環境が提供できるRT住宅といった次世代の住宅モデルをミサワ総研などが中心に開発していく予定である。