株式会社日立製作所【取締役社長 庄山 悦彦】(以下「日立製作所」という)と、松下電工株式会社【代表取締役社長 西田一成】(以下「松下電工」という)は共同で、介護現場で介護支援動作を行う対人サービスシステムを開発している。
日立製作所は、ロボットに関する専門知識の無い看護師や介護者等でも、容易にロボットの動作を計画できるソフトウエア“拡張動作ライブラリ”を提供する。拡張動作ライブラリにより、簡単なマウス操作でロボットに作業をさせる動作コマンドを生成でき、対人サービスシステムに特に必要な、身振りを伴うコミュニケーション動作や体操のような全身協調動作も簡単に実現することができる。また、生成した動作コマンドが確実に実行できるかどうかをロボットの物理的な特性を組み込んだシミュレータでビジュアルに確認し、その後、ロボットに行わせることができる。
松下電工は、携帯端末やロボットに搭載されたディスプレイ・マイク等からなる“対話型ロボット遠隔操作装置”を提供する。この装置は、人間同士の会話の中から動作コマンドに対応する言葉を抽出し、拡張動作ライブラリで生成した動作を実行する。更に、環境の変化や物体を取り扱う作業等の非定常な動作は、ナースステーション内に設置される“遠隔操作コックピット”から、リアルタイムの遠隔操作により対応できる。
今回は、HRP-1を用いて以下のデモを行った。
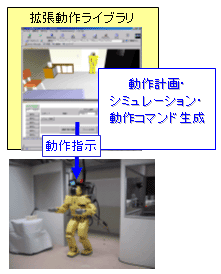
図1 動作生成と実行「(1)、(2)」
|
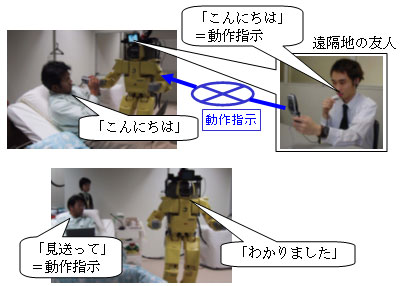
図2 会話中の言葉抽出によるロボットの動作指示「(3)、(4)」
|
(1)拡張動作ライブラリによるロボットの動作計画・動作シミュレーション。【ビデオ上映】
(2)見舞い客がロボットに話し掛けて「案内」をさせる。
(3)遠隔地の友人との会話から動作指示に対応する言葉を抽出し、ロボットを動作させる。
(4)患者が音声で動作指示して、ロボットが見舞い客を見送る。
(5)患者の依頼でナースステーションからロボットを遠隔操作して患者に物を渡す。
(6)ロボット(HRP-1S)が体操インストラクション動作を行う。【ビデオ上映】
多様な環境に対応できる“拡張動作ライブラリ”の開発と、人間との親和性を高めるコミュニケーション機能を備えた“対話型ロボット遠隔操作装置”への改良を予定している。
また、HRP-1よりも高度な動作が可能なHRP-1Sを用いて、より複雑な対人サービス動作を実現する予定である。